






















")
")



- Wszystkie
- Budownictwo i wyposażenie wnętrz
- Kolej
- Lotnictwo
- Maszyny przemysłowe
- Medycyna
- Opakowania i logistyka
- Pojazdy specjalne
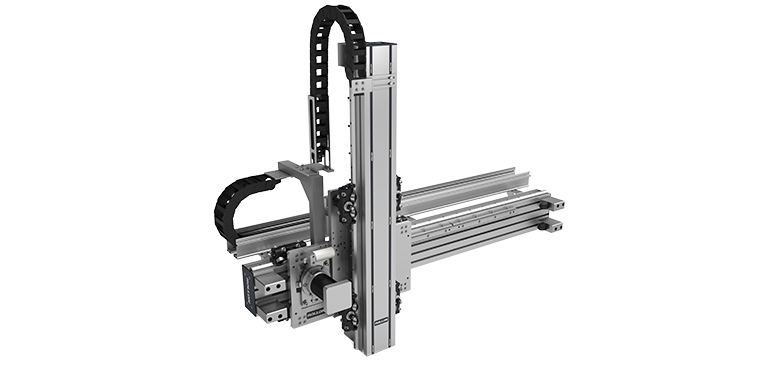
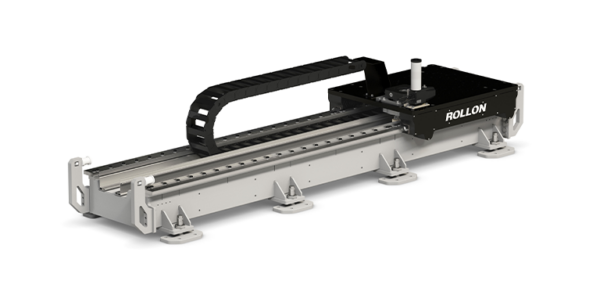
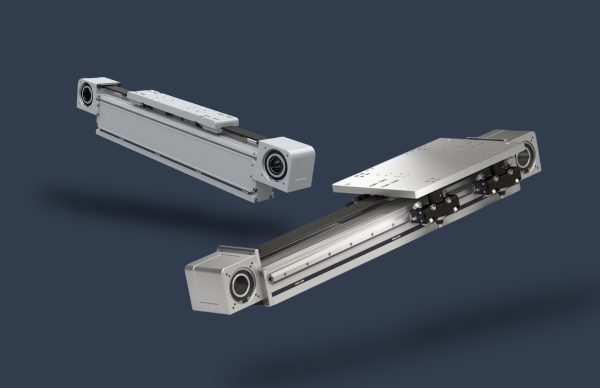
Moduł wieloosiowy YZ (Aluminium)
9
Wszechstronne systemy wieloosiowe zaprojektowane w oparciu o Państwa specyficzne potrzeby.




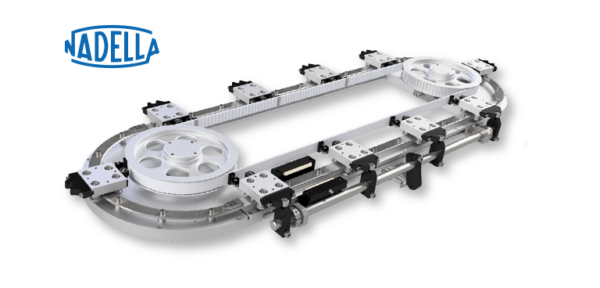
Moduł wieloosiowy XYZ (Aluminium)
6
Wszechstronne systemy wieloosiowe zaprojektowane w oparciu o Państwa specyficzne potrzeby.