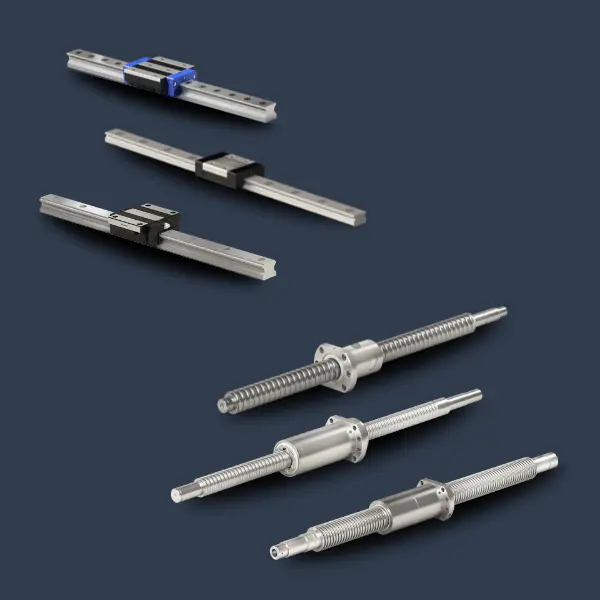
Prowadnice liniowe
Prowadnice liniowe Moduły liniowe
Moduły liniowe XP Xtrem Position
XP Xtrem Position Główki przegubowe
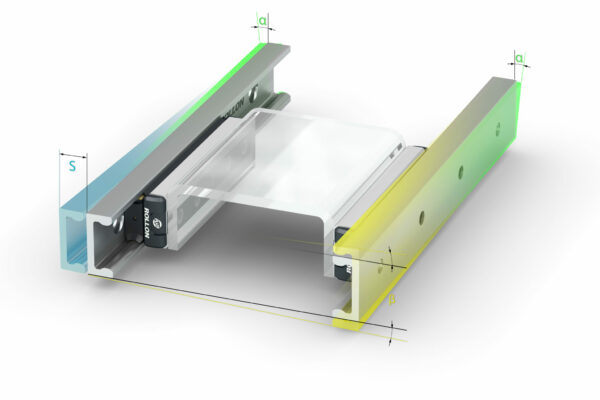
Główki przegubowe Prowadnice teleskopowe
Prowadnice teleskopowe Systemy liniowych
Systemy liniowych XL Xtrem Load
XL Xtrem Load Łożyska przegubowe
Łożyska przegubowe Prowadnice łukowe
Prowadnice łukowe Łożyska
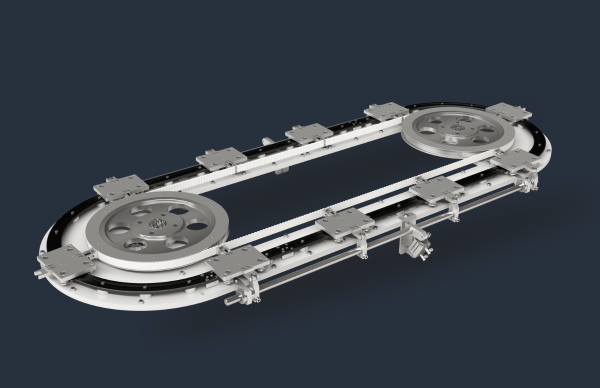
Łożyska Systemy kołowe
Systemy kołowe Rollon RB
Rollon RB Nakrętki blokujące
Nakrętki blokujące Budynki i meble
Budynki i meble Elektronika
Elektronika Kolej
Kolej Maszyny przemysłowe
Maszyny przemysłowe Obrabiarki
Obrabiarki Obsługa i transport materiałów
Obsługa i transport materiałów Opakowania
Opakowania Opieka zdrowotna
Opieka zdrowotna Pojazdy specjalne
Pojazdy specjalne Przemysł lotniczy
Przemysł lotniczy Robotyka i automatyzacja
Robotyka i automatyzacja Żywność i napoje
Żywność i napoje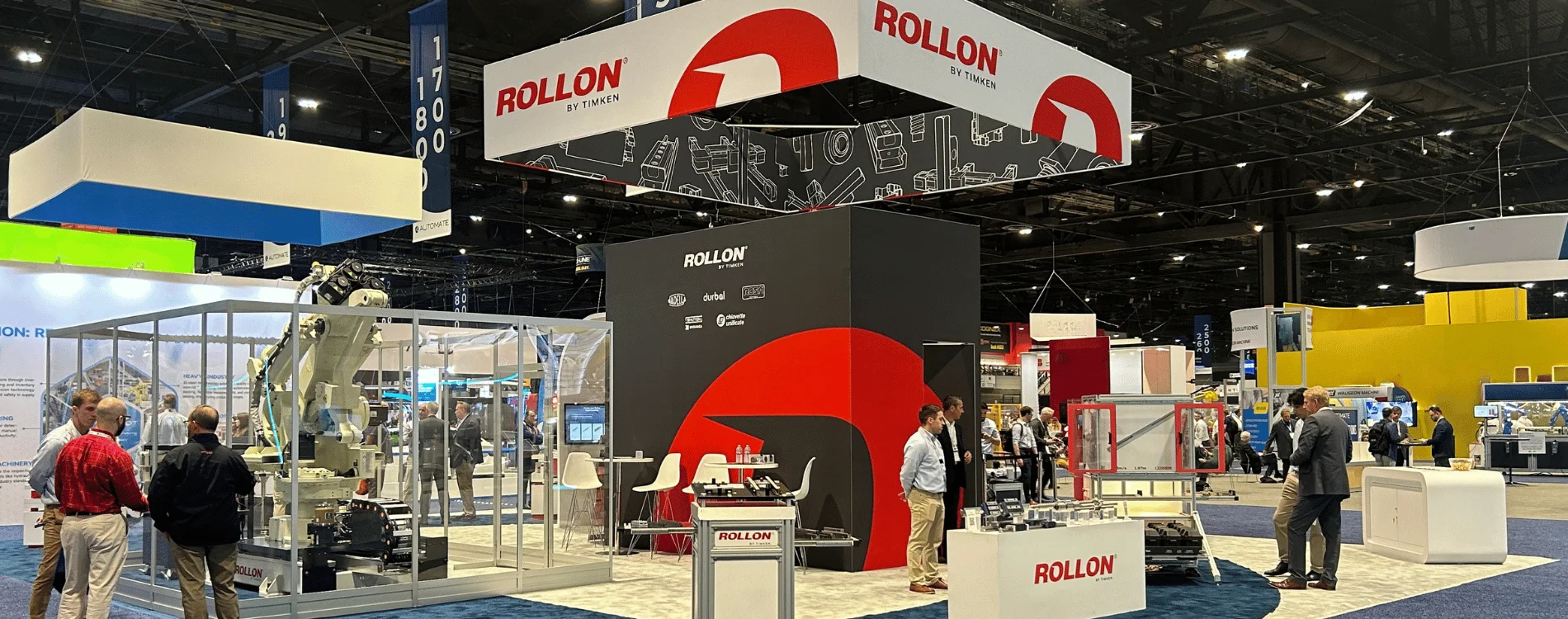







































Pytanie, które jest zadawane od lat, gdy mówimy o automatyzacji z wykorzystaniem cobotów, dotyczy tego, czy rzeczywiście można je uznać za „współpracujące”. Jest to pytanie często zadawane przez osoby badające np. relacje człowiek-maszyna lub pracujące w dziedzinie norm i certyfikacji.
Relacja człowiek-maszyna
Badania w zakresie współpracy często koncentrują się na relacji między człowiekiem a maszyną oraz na związanych z tym czynnikach bezpieczeństwa i ryzyka. Jedną z możliwości jest sytuacja, gdy maszyna poruszy się z nadmierną prędkością obok operatora lub gdy operator zostanie nieumyślnie uderzony. Inny przykład – jeśli maszyna ma zamontowany chwytak lub narzędzie, to nawet podczas poruszania się z prędkością odpowiednią do wykonywanych operacji i obsługiwanego ładunku, przypadkowe uderzenie może przerodzić się w poważny wypadek.
Normy i certyfikaty
Innym sposobem badania współpracy i sprawdzania scenariuszy jest sposób przyjęty przez ekspertów w dziedzinie norm i certyfikacji. Specjaliści zajmujący się tą dziedziną starają się dojść do wniosków pozwalających na określenie ścieżek i scenariuszy, które definiują, kiedy sytuację produkcyjną można uznać za współpracę.
Badania te nie dają skutecznej odpowiedzi na pytanie dotyczące współpracy.
A co jeśli, przynajmniej z perspektywy projektanta przemysłowego, zadajemy złe pytanie?
W rzeczywistości zadaniem projektanta jest jak najlepsze wykorzystanie istniejącej technologii do spełnienia wymagań aplikacji, do której stworzenia został powołany. Zatem „właściwe” pytanie mogłoby i powinno raczej brzmieć: czy najlepszym wykorzystaniem cobota może być wykorzystanie go na wiele sposobów, czy tylko jako „narzędzia współpracy”?
Rozróżniając, „kiedy” współpraca jest rzeczywiście potrzebna w automatyce i na różnych etapach produkcji, projektant przemysłowy może wyrobić sobie pogląd na temat dalszego postępowania (i w ten sposób uzyskać użyteczną odpowiedź na to zagadnienie).
W niektórych sytuacjach coboty mogą i powinny współpracować. Wyobraźmy sobie etap montażu, w którym robot i człowiek pracują w tym samym obszarze roboczym, lub etap, w którym do wykonania pewnych czynności potrzebne jest manualne naprowadzenie.
Jednak kiedy nie jest ono już konieczne? Kiedy robot musi wykonywać zadania – między innymi serwisowanie, zgrzewanie czy pakowanie – w których rola operatora jest marginalna, a raczej nie polega na podejmowaniu działań, lecz na kontroli i zarządzaniu?
Wtedy nie jest już bezwzględnie konieczne, aby technologia była współpracująca. Wystarczyłoby wtedy „fizycznie przesunąć” robota z jednego punktu do drugiego na linii produkcyjnej i pozwolić mu wykonywać różne zadania wymagane do optymalizacji automatyzacji i działać z „stopniami współpracy” faktycznie wymaganymi przez aplikację na każdym konkretnym etapie.
Jest to możliwe. I tu właśnie pojawia się Cobot Transfer Unit (CTU) (Jednostka do przemieszczania Cobotów) firmy Rollon.

Wszystkie zalety urządzenia do liniowego przemieszczania cobotów
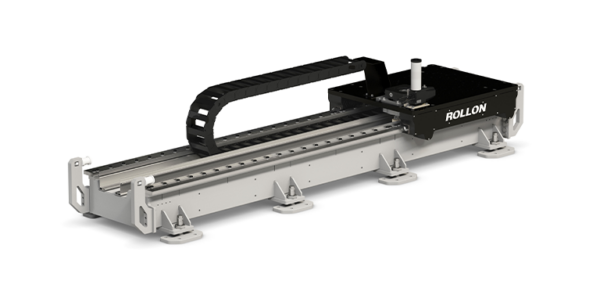
Cobot Transfer Unit firmy Rollon to kompletne, gotowe do montażu rozwiązanie opracowane w celu zwiększenia zasięgu cobotów – począwszy od tych firmy Universal Robots – w zautomatyzowanych procesach w wielu branżach. Siódma oś „specjalna” przeznaczona do przemieszczania współpracujących robotów antropomorficznych.
Ściśle rzecz ujmując, do cech CTU należą:
- ZWIĘKSZONY ZAKRES DZIAŁANIA: dzięki maksymalnemu skokowi przekraczającemu nawet katalogowe, standardowe 5.500 mm, zakres działania cobota zostaje dość znacznie rozszerzony.
- FUNKCJA PLUG AND PLAY jednostki CTU posiada intuicyjny interfejs umożliwiający szybkie programowanie przy użyciu oprogramowania Rollon oraz specjalną funkcję debugowania w celu rozwiązywania wszelkich błędów podczas procesu programowania. Oprogramowanie Rollon może zarządzać nawet sześcioma dodatkowymi osiami, zwiększając pole zastosowania do wielu różnych obszarów roboczych.
- SZYBKA INSTALACJA: CTU posiada płytę przyłączeniową dedykowaną specjalnie dla cobotów, która umożliwia szybką instalację ramienia robotycznego na osi.
- MONTAŻ POZIOMY, PIONOWY I PODŁOGOWY: doskonałe rozwiązanie pozwalające na przeładunek materiałów, montaż, rozprowadzanie, przeprowadzanie kontroli jakości i wykańczanie.
Kompaktowy panel elektryczny, silnik, napęd, przekładnia redukcyjna i kable są uwzględnione w dostawie. CTU posiada również wiele funkcji związanych z zapewnieniem bezpieczeństwa, takich jak jednoczesne, ręczne (poprzez obsługę funkcji stop przy użyciu ręcznego programatora) i automatyczne zatrzymanie awaryjne, które jest aktywowane za pośrednictwem systemów bezpieczeństwa cobota, które jednocześnie blokują oś. Oś może być wyposażona w zewnętrzne czujniki bezpieczeństwa, takie jak skanery laserowe, optyczne i radarowe.
Ponadto, CTU może zintegrować pneumatycznie uruchamiane hamulce, by zablokować wózek na szynie, podczas gdy parametry prędkości i przyspieszenia (V=1,5 m/s A=3m/s2) są zoptymalizowane do pracy z cobotami UR, co ułatwia współpracę.
Prawdziwa (i możliwa) współpraca ma miejsce wtedy, gdy jest rzeczywiście wymagana.
CTU jest więc zarówno rozwiązaniem najwyższej klasy wśród produktów z zakresu ruchu liniowego, jak i narzędziem automatyki przemysłowej, które łączy współpracę robotów z ruchem, nawet na długich odcinkach.
CTU stanowi maksymalną manifestację zarówno robota (współpracującego), jak i potrzeby liniowego przemieszczania, co pozwala na wykorzystanie go jako prawdziwego przemysłowego robota antropomorficznego, zawsze gdy zachodzi taka potrzeba.
Czy zatem konieczna jest „współpraca”? Cobot może spełnić tę funkcję. Czy potrzebna jest maksymalna prędkość i najwyższe możliwości robota? Cobot może przemieścić się do bezpiecznego punktu i wykonać zadanie.