Guidages linéaires
Guidages linéaires Axes linéaires
Axes linéaires XP Xtrem Position
XP Xtrem Position Embouts à rotule
Embouts à rotule Glissières télescopiques
Glissières télescopiques Multi-Axes
Multi-Axes XL Xtrem Load
XL Xtrem Load Rotules
Rotules Guidages courbes
Guidages courbes Roulements à aiguilles
Roulements à aiguilles Système circulaire
Système circulaire Rollon RB
Rollon RB Ecrous de serrage
Ecrous de serrage Aéronautique
Aéronautique Alimentation et boissons
Alimentation et boissons Bâtiment et ameublement
Bâtiment et ameublement Emballage
Emballage Ferroviaire
Ferroviaire Industrie électronique
Industrie électronique Machines industrielles
Machines industrielles Machines-outils
Machines-outils Manutention de matériaux
Manutention de matériaux Robotique et automatisation
Robotique et automatisation Santé
Santé Véhicules spéciaux
Véhicules spéciaux










































Dans les lignes d’emballage, tout repose sur la capacité à déplacer les produits rapidement, avec précision et fiabilité, d’un poste à l’autre. Chaque transfert et chaque dépose doivent être parfaitement synchronisés avec les convoyeurs, les stations de formage et les unités de fermeture. C’est précisément dans ce contexte que le système pick and place devient un élément clé de la ligne. Associé à une technologie de mouvement linéaire adaptée, il peut faire la différence entre une cellule de conditionnement atteignant régulièrement ses objectifs de production et une installation confrontée à des pertes de cadence, des blocages et une maintenance excessive.
Pourquoi les systèmes pick and place sont essentiels à la manutention automatisée moderne
Un système pick and place ne se limite pas à un simple robot déplaçant des pièces d’un point A à un point B. Dans une ligne d’emballage, il doit se synchroniser avec les convoyeurs, les systèmes d’alimentation, les opérations de formage et de fermeture, ainsi qu’avec les dispositifs de vision, et parfois d’impression ou d’étiquetage. Il fonctionne en continu, souvent sur plusieurs équipes, tout en manipulant des produits de dimensions, de masses et de formats variés.
La manutention automatisée vise avant tout à stabiliser les performances de la ligne. Un robot pick and place bien conçu permet de lisser les flux d’entrée irréguliers, de manipuler les produits avec douceur et de maintenir des temps de cycle constants. Lorsque les axes de mouvement sont précis et répétables, les changements de format s’effectuent plus rapidement, les transitions entre produits sont simplifiées et les taux de rebut diminuent grâce à une manipulation maîtrisée et prévisible.
La flexibilité constitue également un enjeu majeur. Un système pick and place modulaire, basé sur des axes linéaires standardisés et des modules Multi-Axes, peut souvent être reconfiguré pour de nouveaux produits ou de nouvelles implantations sans nécessiter une refonte complète de la machine. Cette approche s’avère particulièrement pertinente lorsque les utilisateurs finaux souhaitent ajouter une alimentation supplémentaire, modifier un schéma de conditionnement ou intégrer une étape d’inspection supplémentaire.

Vitesse, répétabilité et disponibilité : les exigences clés des lignes d’emballage
Les lignes d’emballage sont généralement évaluées selon le nombre de pièces par minute, le temps de changement de format et l’efficacité globale des équipements. Le système pick and place influence directement chacun de ces critères. Il doit atteindre des vitesses et des accélérations élevées pour suivre le rythme des autres éléments de la ligne, tout en revenant avec précision aux mêmes positions cycle après cycle afin de garantir une dépose fiable.
La répétabilité dépend fortement de la qualité des axes linéaires. Si les guidages ou les unités à transmission par courroie génèrent des frottements variables ou de faibles jeux mécaniques, le robot pick and place peut progressivement s’écarter de sa trajectoire nominale. Cela se traduit par des produits mal positionnés et, à terme, par des risques de bourrage.
Une cellule pick and place peut effectuer plusieurs centaines de milliers de cycles par jour. Toute faiblesse dans la conception mécanique, la lubrification ou l’étanchéité devient rapidement une source d’arrêts non planifiés. Des axes linéaires à transmission par courroie correctement dimensionnés en fonction des charges, des accélérations et du régime de fonctionnement contribuent à allonger les intervalles de maintenance. Lorsque les axes sont protégés contre la poussière, les résidus de produits et les débris d’emballage, l’ensemble du système pick and place gagne en robustesse et en fiabilité sur le long terme.
Axes linéaires à transmission par courroie pour les robots pick and place
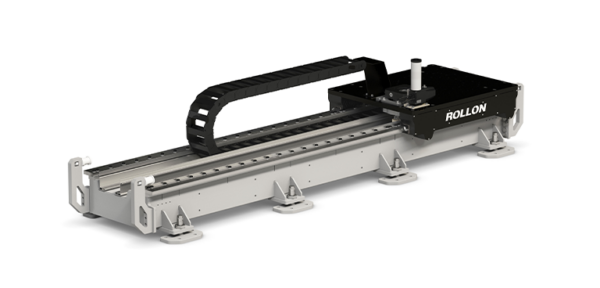
Dans de nombreuses architectures pick and place, en particulier pour les robots cartésiens ou de type portique, les mouvements horizontaux et verticaux sont assurés par des axes linéaires à transmission par courroie. Ce mode d’entraînement répond parfaitement aux exigences de la manutention automatisée à grande vitesse, grâce à une masse en mouvement réduite, des accélérations élevées et un fonctionnement relativement silencieux.
Dans une configuration typique, un ou plusieurs axes linéaires constituent les axes X, Y et parfois Z du robot pick and place. Ces axes sont guidés par des rails linéaires et entraînés par une courroie crantée circulant sur des poulies reliées à des servomoteurs. L’ensemble peut être installé au-dessus du convoyeur, le long de la ligne ou intégré dans un bâti afin de desservir plusieurs voies. L’utilisation de modules Multi-Axes permet d’assembler plusieurs unités à transmission par courroie pour créer des systèmes cartésiens complets, avec des courses, des capacités de charge et des interfaces de montage prédéfinies.
Cette approche présente plusieurs avantages par rapport aux axes à vis pour les mouvements pick and place rapides. Si les vis à billes excellent en précision et en capacité d’effort sur des courses plus courtes, la transmission par courroie permet généralement d’atteindre des vitesses supérieures sur de plus longues distances. Elle convient ainsi parfaitement aux transferts rapides entre différentes stations de regroupement ou au suivi de produits en mouvement sur un convoyeur.
Les avantages de la transmission par courroie dans les systèmes pick and place
Le premier avantage majeur de la transmission par courroie dans un système pick and place réside dans ses performances dynamiques. La faible masse de la courroie et des poulies permet au moteur d’accélérer rapidement le chariot, un facteur déterminant pour réduire les temps de cycle. Des accélérations et décélérations élevées peuvent être obtenues sans exiger des couples excessifs, ce qui contribue à maîtriser la taille des moteurs et la consommation énergétique.
La flexibilité de course constitue un autre atout important. Les machines d’emballage nécessitent souvent de longues courses pour couvrir plusieurs voies, plusieurs convoyeurs d’alimentation ou des zones de regroupement étendues. Avec des axes linéaires à transmission par courroie, l’allongement de la course se fait principalement par l’extension du profilé et de la courroie, sans les coûts ni la complexité associés aux vis de grande longueur. Cette caractéristique s’avère particulièrement pertinente lorsque le robot pick and place doit intervenir à différents points le long de la ligne ou atteindre des palettes éloignées du convoyeur principal.
La transmission par courroie offre également un fonctionnement fluide et silencieux. Ce comportement améliore le confort des opérateurs et prolonge la durée de vie des composants mécaniques. La réduction des vibrations limite les contraintes sur la structure, les préhenseurs et les systèmes de vision, ce qui favorise une répétabilité plus stable sur le long terme en manutention automatisée
Comment les solutions Rollon s’intègrent dans une architecture pick and place modulaire
Rollon accompagne les constructeurs de machines et les intégrateurs en proposant un large portefeuille de composants de mouvement linéaire, combinables pour concevoir des architectures complètes de systèmes pick and place. Au sein de la gamme Actuator Line, plusieurs familles d’axes linéaires à transmission par courroie sont spécifiquement conçues pour les applications de manutention à grande vitesse. Ces axes intègrent guidages linéaires, courroies crantées, poulies et interfaces moteurs dans un ensemble compact et robuste, ce qui simplifie la conception mécanique et réduit les délais d’ingénierie.
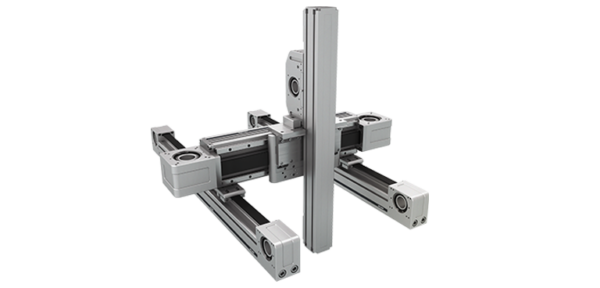
Pour les implantations plus complexes, Rollon propose des solutions multi-axes combinant plusieurs axes linéaires au sein de systèmes cartésiens ou portiques. Cette approche modulaire permet aux concepteurs de configurer des structures X, Y et Z adaptées aux courses, aux charges et aux zones de travail requises, tout en s’appuyant sur des composants validés. Comme les modules sont conçus pour fonctionner ensemble, les problématiques de rigidité, d’alignement et de comportement dynamique sont plus faciles à maîtriser, ce qui rend le robot pick and place plus prévisible en exploitation.
En associant des axes linéaires à transmission par courroie, des systèmes Multi-Axes modulaires et des guidages linéaires adaptés, Rollon aide les constructeurs à développer des solutions pick and place offrant la vitesse, la répétabilité et la disponibilité exigées par les lignes d’emballage modernes. Le résultat est un processus de manutention automatisée plus fiable, avec des cycles de conception raccourcis, une intégration facilitée et la capacité de s’adapter rapidement à de nouveaux produits et formats sans compromis sur les performances.
Pourquoi les systèmes pick and place sont-ils essentiels pour la manutention automatisée?
Un système pick and place assure un transfert rapide et constant des produits entre les postes. Il stabilise les cadences, réduit la manutention manuelle et améliore l’efficacité globale et la fiabilité des lignes de manutention automatisée.
Quel est le rôle de la transmission par courroie dans un robot pick and place?
Dans un robot pick and place, la transmission par courroie permet d’atteindre des vitesses élevées, des accélérations rapides et de longues courses avec une inertie réduite. Elle est donc particulièrement adaptée aux mouvements répétitifs et rapides typiques des applications d’emballage et de manutention.
Quels paramètres faut-il considérer pour choisir un système pick and place performant?
Il convient d’analyser la vitesse et le temps de cycle requis, la charge à manipuler, les longueurs de course, la répétabilité de positionnement, le régime de fonctionnement, l’encombrement disponible, l’environnement d’exploitation et les exigences de maintenance du système pick and place.
Comment les solutions Rollon peuvent-elles améliorer un robot pick and place?
Rollon combine des axes linéaires à transmission par courroie et des systèmes Multi-Axes modulaires avec des guidages linéaires adaptés afin de créer des architectures cartésiennes rigides et rapides. Ces solutions sont plus faciles à intégrer, mieux adaptées aux contraintes structurelles et optimisées pour des performances durables dans les applications pick and place.