Guidages linéaires
Guidages linéaires Axes linéaires
Axes linéaires XP Xtrem Position
XP Xtrem Position Embouts à rotule
Embouts à rotule Glissières télescopiques
Glissières télescopiques Multi-Axes
Multi-Axes XL Xtrem Load
XL Xtrem Load Rotules
Rotules Guidages courbes
Guidages courbes Roulements à aiguilles
Roulements à aiguilles Système circulaire
Système circulaire Rollon RB
Rollon RB Ecrous de serrage
Ecrous de serrage Aéronautique
Aéronautique Alimentation et boissons
Alimentation et boissons Bâtiment et ameublement
Bâtiment et ameublement Emballage
Emballage Ferroviaire
Ferroviaire Industrie électronique
Industrie électronique Machines industrielles
Machines industrielles Machines-outils
Machines-outils Manutention de matériaux
Manutention de matériaux Robotique et automatisation
Robotique et automatisation Santé
Santé Véhicules spéciaux
Véhicules spéciaux










































Un robot sur rail, souvent qualifié de septième axe, consiste à installer un robot industriel sur un système linéaire afin de lui permettre de se déplacer le long d’un axe supplémentaire. Au lieu d’opérer uniquement dans son enveloppe de travail standard, le robot peut se déplacer vers les zones à desservir, ce qui étend la surface de la cellule sans multiplier le nombre de robots.
En automatisation industrielle moderne, cette approche est largement utilisée pour permettre à un même robot de desservir plusieurs postes, de manipuler des pièces longues ou de relier des opérations qui nécessiteraient autrement plusieurs cellules robotisées distinctes.
Le rôle du septième axe dans l’automatisation industrielle moderne
Dans de nombreux sites industriels, la principale contrainte des robots industriels n’est ni la charge utile ni la dextérité du poignet, mais l’espace de travail. Un robot peut parfaitement être capable de souder, de déposer, de palettiser, d’alimenter des machines ou de manipuler des pièces, tout en restant limité à un rayon d’action fixe.
Le septième axe permet de lever cette contrainte en offrant au robot un déplacement de grande amplitude, par exemple entre deux zones de travail distinctes.
C’est pour cette raison que les robots sur rail sont fréquemment intégrés dans des projets d’automatisation où il est nécessaire d’optimiser à la fois la cadence et l’emprise au sol. Lorsqu’un seul robot peut alimenter deux machines CNC, desservir plusieurs postes de contrôle ou travailler le long d’un poste d’assemblage étendu, la cellule devient plus simple à exploiter et plus facile à faire évoluer.
Évolution de la robotique industrielle et nouvelles architectures de cellules robotisées
L’évolution de la robotique industrielle ne repose pas uniquement sur des contrôleurs plus performants ou des capteurs plus avancés. Elle concerne aussi la manière dont les systèmes de mouvement, les zones de sécurité et les postes de travail sont organisés afin que le robot apporte de la valeur sur une plus grande partie de la ligne.
L’ajout d’un septième axe oriente la conception des cellules vers des architectures plus linéaires. Plutôt que de multiplier des îlots robotisés indépendants, les industriels peuvent créer des zones de travail connectées, dans lesquelles les robots se déplacent entre plusieurs opérations le long d’un même rail. Cette approche s’inscrit naturellement dans une logique de production modulaire. Il devient alors possible d’ajouter un poste le long du rail ou de repositionner certaines stations à mesure que le procédé évolue, sans remettre en cause l’ensemble du concept d’automatisation.
Choisir une solution robotique de type robot sur rail
Le choix d’un robot sur rail dépend généralement moins du robot lui-même que de l’adéquation du système linéaire aux conditions réelles d’exploitation. Le rail fait partie intégrante de la chaîne cinématique du robot. Toute concession sur la rigidité, la qualité des guidages ou le dimensionnement de l’entraînement peut se traduire par des vibrations, une répétabilité réduite ou des temps de stabilisation plus longs au niveau de l’outil.
C’est pourquoi la sélection s’appuie principalement sur le dimensionnement mécanique, les performances attendues, les contraintes d’intégration et la facilité de maintenance sur le long terme.
Dimensionnement mécanique et critères de performance pour les robots industriels
Une approche pragmatique consiste à considérer le rail comme une base mobile et à définir précisément les mouvements du robot pendant son déplacement. Certaines applications se limitent à repositionner le robot entre différentes stations, tandis que d’autres nécessitent un mouvement coordonné, dans lequel le septième axe se déplace pendant l’opération. Ce second cas impose généralement des exigences plus élevées en matière de rigidité et de stabilité dynamique, car le point outil doit rester maîtrisé pendant le déplacement de la base.
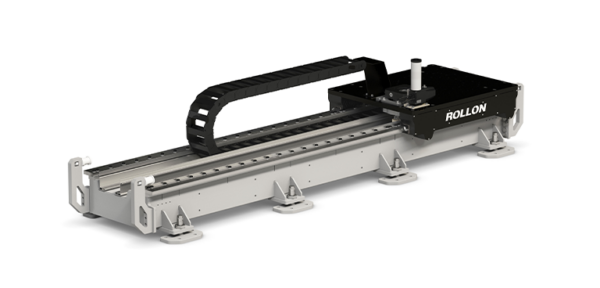
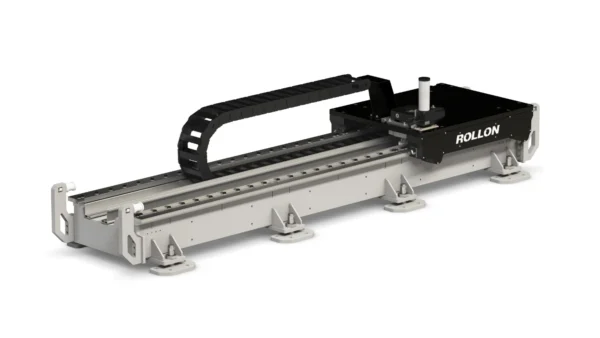
La longueur de course constitue souvent le premier critère de choix. Les grandes courses sont précisément là où un robot sur rail apporte le plus de valeur, mais elles influencent également la flèche de la structure, la stratégie d’alignement et le choix de l’entraînement. C’est l’une des raisons pour lesquelles les Robot Transfer Units sont conçues pour des déplacements très longs. Le concept des RTU Rollon permet d’atteindre des courses potentiellement illimitées, ce qui correspond à l’objectif même d’un septième axe, étendre la portée du robot sans contrainte artificielle.
La charge et l’inertie représentent le second critère majeur. Le système linéaire ne supporte pas uniquement la masse du robot. Il subit également les efforts dynamiques liés aux accélérations et décélérations, ainsi que les forces générées par le procédé, transmises via la base du robot. Les RTU acier de Rollon sont conçus comme des systèmes de mouvement capables d’étendre la portée du robot et de créer un déplacement linéaire fiable, ajoutant ainsi une dimension supplémentaire à l’espace de travail.

Intégration et maintenance des robots industriels sur un système de septième axe Rollon
Un septième axe n’apporte un réel bénéfice que s’il reste fiable dans le temps. La maintenance des robots industriels et l’accessibilité pour les opérations courantes doivent donc être prises en compte dès la phase de sélection, et non après coup. Dans de nombreuses usines, les arrêts de fonctionnement ne proviennent pas de la technologie elle-même, mais de détails d’intégration tels qu’un cheminement de câbles mal adapté, des procédures d’alignement trop sensibles ou des composants difficiles à inspecter sans immobiliser la ligne.
C’est sur ces aspects que les RTU Rollon (Robot Transfer Units) sont conçus pour améliorer la portée des robots et s’adapter à différents types de robots, tout en privilégiant un ancrage rapide et des opérations d’alignement simplifiées. Lorsque l’alignement est plus facile à maintenir, les équipes de maintenance passent moins de temps à corriger des dérives et davantage à effectuer des contrôles préventifs planifiés.
L’intégration concerne également la manière dont le septième axe s’insère dans la cinématique globale de la cellule. Dans certaines architectures, le robot sur rail constitue l’élément de déplacement principal. Dans d’autres, il fonctionne en complément de systèmes cartésiens, de portiques ou de transferts. Les systèmes Multi-Axes Rollon correspondent à des unités linéaires combinées de type XYZ, disponibles dans différentes configurations et technologies d’entraînement. Ils sont utilisés dans des applications allant de la robotique avancée aux lignes de production à haute cadence.
[/vc_toggle]
Qu’est-ce qu’un robot sur rail dans l’automatisation industrielle ?
Un robot sur rail est un robot industriel installé sur un système linéaire lui permettant de se déplacer le long d’un axe supplémentaire. Cette configuration étend sa zone de travail et lui permet de desservir plusieurs postes.
Pourquoi ajouter un septième axe à un robot industriel ?
L’ajout d’un septième axe accroît la flexibilité et la productivité en étendant la portée du robot. Il peut ainsi se déplacer entre différents postes et réduire le besoin de multiplier les robots sur une même ligne.
Quels critères considérer pour choisir un robot sur rail ?
Les principaux critères incluent la longueur de course, la charge et les efforts dynamiques, la répétabilité de positionnement requise, la rigidité et le comportement vibratoire, les contraintes d’installation et la facilité d’intégration dans la cellule existante.
Comment les solutions Rollon facilitent-elles la maintenance des robots sur rail ?
Les systèmes RTU Rollon sont conçus pour assurer des déplacements fiables sur de longues courses, avec des solutions d’intégration favorisant un alignement plus simple et un accès facilité. Cela permet de réduire les temps d’arrêt et de maintenir des performances constantes dans le temps.