Linear guides
Linear guides Linear actuators
Linear actuators XP Xtrem Position
XP Xtrem Position Rod ends
Rod ends Telescopic rails
Telescopic rails Multi-axis
Multi-axis XL Xtrem Load
XL Xtrem Load Spherical plain bearings
Spherical plain bearings Curved guides
Curved guides Needle roller bearings
Needle roller bearings Circular systems
Circular systems Rollon RB
Rollon RB Locknuts and rings
Locknuts and rings Aerospace
Aerospace Building and Furniture
Building and Furniture Electronics
Electronics Food & Beverage
Food & Beverage Healthcare
Healthcare Industrial machines
Industrial machines Machine tool
Machine tool Material Handling
Material Handling Packaging
Packaging Railway
Railway Robotics & Automation
Robotics & Automation Special Vehicles
Special Vehicles









































Inertial forces, mechanical stress, deflection, and cantilevered loads significantly affect performance, precision, and service life in robotics and automation applications. This whitepaper outlines the key criteria for selecting linear motion solutions to address these challenges, focusing on how to effectively manage the interplay between mass, acceleration, and overall system dynamics.
When specifying linear motion components for robotics and automation applications, the axes’ loads and speeds are key selection criteria. That’s especially true when axes involve heavy loads or high speeds – or both. After all, force = mass ´ acceleration, and machinery assemblies moving heavy payloads must output high forces to overcome their high inertias, especially when the quick accelerations and decelerations of high-speeds operations are involved.
Accommodating high loads
Robotic and automation installations must generate sufficient force to move their attached payloads. When payloads are especially heavy, there are other factors that must be addressed to ensure design safety, speed, and precision.
Elevated mechanical stress
Unless machine assemblies are designed for high loads, the effects of inertia can cause mechanical stress in their components and shorten their service life. High loads increase the forces on linear guides, rotary bearings, the teeth of racks in rack-pinion assemblies, and couplings.
More pronounced deflection
Unless actuator stiffness is prioritized, high loads can also cause axes to deflect. Even tiny deflections under dynamic loading can cause millimeter-scale positioning errors at machines’ end effectors, especially when axes are at their furthest reaches.

Rollon® YZ PAR/PAS gantries include self-supporting extruded aluminum frames with high torsional rigidity and rack-pinion transmission for multi-axes in pick-and-place, industrial machine tending, and logistics. Some variations can transport payloads up to 2,000 kg over travels extending 12 m. Speeds up to 4 m/sec are possible.
Linear guides, actuators, gantries, and RTUs from Rollon come in aluminum and steel-frame variations (with subcomponents constructed of various precision-engineered materials) to resist torsion and deflection as well as wear and other challenges.
Magnified cantilevered-load effects
If the payload transported by an actuator, gantry, or RTU is at all cantilevered – as when a robot arm borne by an RTU reaches outward, for example – it demands more force than if the payload was perfectly rigid and centered on the carriage. With large loads especially, the offset distance from the gravity center to the axis’ center introduces significant pitching moments that force support structures, linear bearings, and drives to essentially resist rotation. That causes load redistributions within the bearings, which can make for higher friction, as well as structural deflection. The latter in turn coupes linear translation with a slight assembly rotation that can degrade repeatability and linearity over the stroke. In short, such moments can effectively create a dynamic penalty which can be quite significant if the payload has very high mass.
Suitable linear components and actuator solutions
Linear guides destined for dynamic axes often feature track-roller variations. These can provide payload capacity and stiffness along with high speed and acceleration. Rollon’s own prismatic rail and other roller-based guides – including Heavy Line and V-Line – also withstand dirty or aggressive environments.
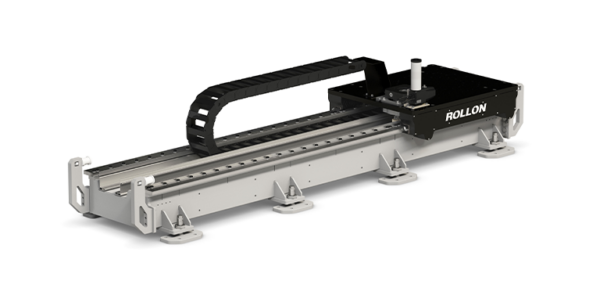
Consider just one example of a synchronous belt-driven product line built to handle high loads. Rollon® R-SMART and R-SMART-R linear actuators offer high load capacity with self-supporting extruded-aluminum structures. Widths from 120 to 280 mm bear and transport very heavy loads in automated equipment involving demanding work cycles and cantilever or gantry mounting. Multiple sliders can boost load capacity. The carriage is supported by twin linear guides that are profile rails pairs with recirculating bearing balls (R-SMART) or hardened prismatic rails that pair with track rollers (R-SMART-R). The R-SMART can run to 4 m/sec and 50 m/sec2 while the R-SMART-R can run to 8 m/sec and 20 m/sec2 and self-lubricating tanks or blocks with felts provide lubrication.

Rollon® R-SMART actuators can bear and transport very high load thanks to a rugged aluminum structure and substantial belt drive. The drive’s pulleys are large and have reinforced bearings for less stress on the motor and gearbox bearings (as slower motor rpm is possible with a larger pulley diameter). Shown here is the R-SMART 160; 230 and 280 versions extend the capabilities of these actuators.
Continue reading to discover how inertia impacts actuator sizing and system performance, the relationship between payload mass, acceleration, positioning accuracy and practical selection guidelines for robotics and automation applications.