Linear guides
Linear guides Linear actuators
Linear actuators XP Xtrem Position
XP Xtrem Position Rod ends
Rod ends Telescopic rails
Telescopic rails Multi-axis
Multi-axis XL Xtrem Load
XL Xtrem Load Spherical plain bearings
Spherical plain bearings Curved guides
Curved guides Needle roller bearings
Needle roller bearings Circular systems
Circular systems Rollon RB
Rollon RB Locknuts and rings
Locknuts and rings Aerospace
Aerospace Building and Furniture
Building and Furniture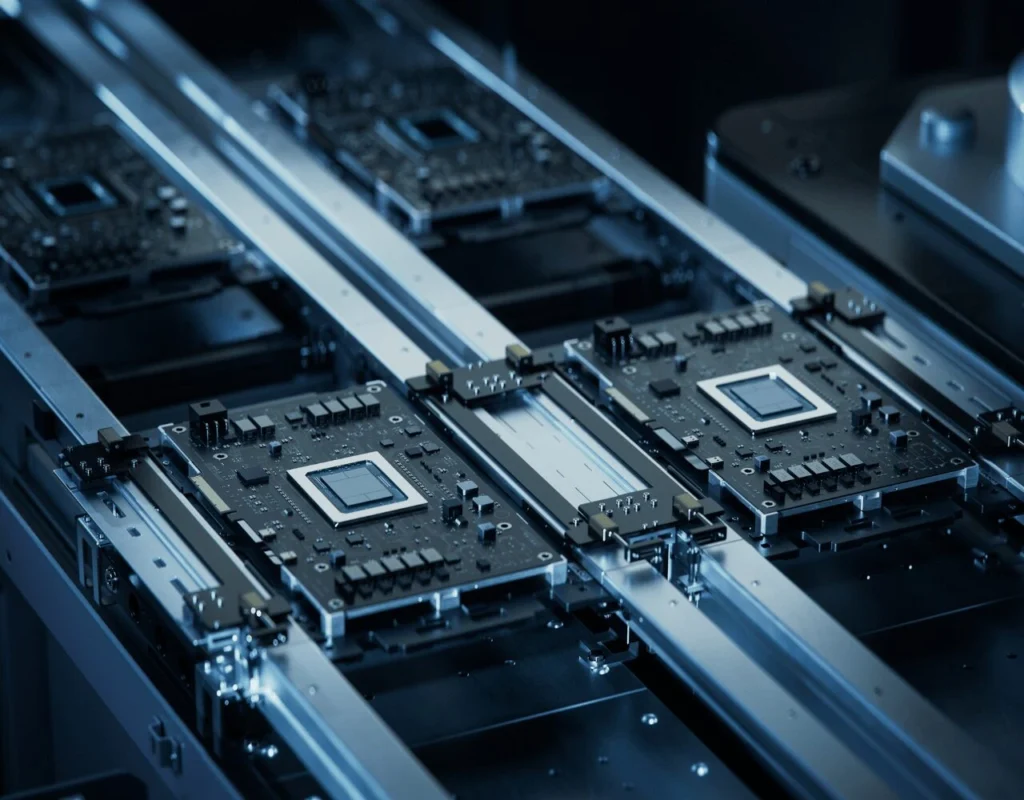 Electronics
Electronics Food & Beverage
Food & Beverage Healthcare
Healthcare Industrial machines
Industrial machines Machine tool
Machine tool Material Handling
Material Handling Packaging
Packaging Railway
Railway Robotics & Automation
Robotics & Automation Special Vehicles
Special Vehicles










































The pick and place robot sits at the heart of modern automated manufacturing, performing one of the most fundamental yet technically demanding tasks in any production environment: moving a component or product from one defined position to another with speed, precision, and absolute consistency. The cartesian robot has become an essential enabler of competitive throughput. This guide examines the principal types of pick and place automation, the engineering factors that govern their performance, and the role that Rollon’s Linear Actuators and multi-axis gantry systems play in delivering the speed and accuracy that high-cycle applications demand.
What is a Pick and Place Robot? Definition and Working Principle
A pick and place robot is an automated system designed to locate a workpiece at a source position, grasp or otherwise secure it, transport it along a defined motion path, and release it at a target position. The cycle is then repeated continuously, typically at rates measured in cycles per minute that no manual operation can sustainably match. The working principle draws on a combination of motion control, sensing, and end-effector technology, all coordinated by a programmable controller that governs axis velocities, acceleration profiles, and positional targets.
The accuracy and repeatability of the robot pick and place cycle depend critically on the quality of the motion components underpinning the system. Whether the robot uses rotary joints or linear axes, any compliance, backlash, or thermal drift in the guidance and drive elements will manifest directly as positional error at the end effector. For applications in electronics assembly or pharmaceutical blister packing the selection of precision Linear Actuators and Linear Axes is therefore as consequential as the choice of controller or vision system.
Types: Cartesian, SCARA, Delta and Articulated
Four principal architectures cover the majority of cartesian robot deployments in Indian industry. The Cartesian, or gantry, robot moves along orthogonal linear axes in X, Y, and Z, delivering deterministic positioning accuracy across a well-defined rectangular working envelope. Because each axis operates independently along a straight path, cumulative angular errors are eliminated, and the system is straightforward to programme and integrate. Cartesian configurations are particularly well suited to heavy payloads and long-stroke applications.
The SCARA robot uses two horizontal rotary joints and one vertical linear axis to achieve fast, repeatable motion in a horizontal plane with controlled vertical descent. It is the architecture of choice for high-speed assembly and packaging tasks where cycle times are critical and the working envelope is compact. The delta robot, by contrast, suspends its end effector from three parallel arm linkages mounted on a fixed overhead frame, achieving extremely high cycle rates for lightweight products such as confectionery, blister packs, or small electronic components. Finally, the articulated six-axis robot offers the greatest flexibility of orientation and reach, at the cost of higher mechanical complexity and greater sensitivity to joint wear over time.
Key Engineering Factors: Speed, Payload, Repeatability and Reach
Specifying a pick and place robot arm correctly requires a clear understanding of four interrelated engineering parameters. Speed, typically expressed as cycles per minute or peak axis velocity, must be matched to the upstream production rate without introducing dynamic errors that degrade placement accuracy. Payload capacity covers the combined weight of the end effector and the heaviest workpiece the system must handle, including any dynamic forces generated during acceleration and deceleration.
Repeatability is the single most important accuracy metric for pick and place robot project engineers to verify during system specification. It is distinct from absolute accuracy, which describes how closely the robot reaches a nominally programmed position from a cold start. In practice, repeatability is governed by the mechanical quality of the guidance and drive components, particularly the preload and stiffness of the Linear Actuators or joint bearings. Reach, the final parameter, defines the spatial extent of the working envelope and must comfortably encompass all source and target positions, including any safety clearances required by the machine guarding layout.
Pick and Place Robot Diagram and System Layout
A typical pick and place robot diagram for a Cartesian gantry configuration shows the following key subsystems arranged around the working envelope. The X axis, usually the longest stroke, spans the full width of the working area and is carried on a structural beam or pair of parallel rails. The Y axis bridges the X axis and carries the Z axis carriage. The Z axis provides the vertical travel needed for the end effector to descend to the pick and place positions. Each axis is driven by a motor-actuator assembly connected to the controller via a servo drive. A vision system or sensor array located above or alongside the working area provides workpiece location data to the controller, enabling the robot to compensate for positional variation in incoming parts.
Understanding this layout from a pick and place robot diagram perspective helps engineers identify where component selection has the greatest impact on system performance. The Z axis, which must decelerate precisely to avoid impact at the pick position and accelerate quickly to minimise cycle time, places the most demanding combined requirements on the linear actuator: high stiffness, low friction, and excellent dynamic response are all required simultaneously.
The Role of Linear Actuators and Gantry Systems in Pick and Place
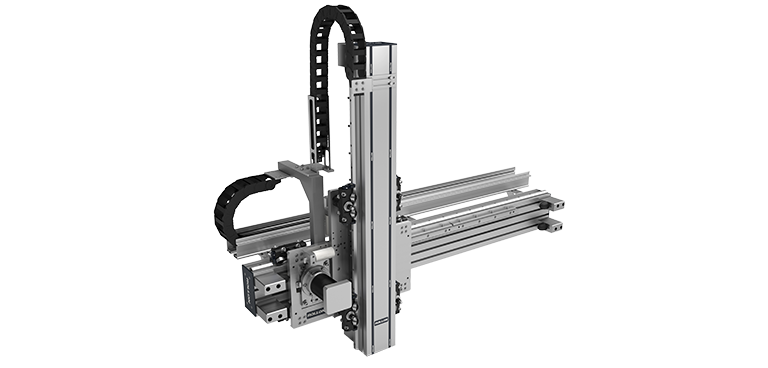
The linear actuator is the fundamental building block of any Cartesian gantry robot system. It converts rotary motor output into controlled linear displacement, combining a profiled rail or beam, a driven carriage, and a transmission element into a single integrated unit. The quality of each of these elements determines the axis performance characteristics: a linear actuator with a precision-ground recirculating ball carriage and a low-backlash drive will deliver the sub-millimetre repeatability that high-cycle cartesian robot applications require. An electric linear actuator offers clean, controllable operation without the compressed air infrastructure that pneumatic alternatives demand, making it the preferred choice for precision automation in electronics and pharmaceutical environments.
For longer strokes or heavier payloads, the linear axis must be designed to resist both bending and torsional loads generated as the moving carriage accelerates with an extended reach. This is where the structural design of the actuator profile and the moment load rating of the rolling element guidance become critical. Rollon engineers these characteristics into its Linear Actuators range to ensure that the axis maintains its positional accuracy under the full range of dynamic loads encountered in high-speed pick and place robot operation.
Rollon Multi-Axis Solutions for High-Cycle Operations
Rollon’s Linear Axes portfolio provides engineers with a complete set of building blocks for constructing high-performance Cartesian gantry robot systems. The range spans compact mini linear actuator configurations for lightweight, high-speed tasks through to heavy-duty units capable of handling substantial payloads across extended strokes. Drive options include toothed belt for high-speed low-load applications, ball screw assemblies for precision positioning under axial force, and rack-and-pinion configurations for long-travel axes where belt compliance would introduce unacceptable positioning error.
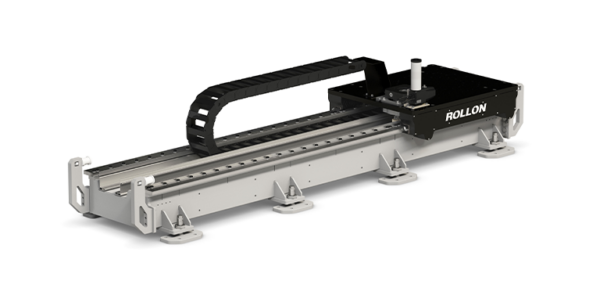
The Motion Box is Rollon’s fully enclosed belt-driven linear actuator designed for straightforward integration into multi-axis gantry architectures. Its sealed aluminium profile protects the drive components from the contamination reducing maintenance requirements and extending service life. The compact cross-section of the Motion Box simplifies integration into space-constrained pick and place robot frames without compromising the structural rigidity that high-cycle dynamics demand.
For multi axis systems where two or three Linear Axes must be combined into a complete gantry, Rollon’s modular approach allows each axis to be independently specified for its particular load and speed conditions, whilst maintaining dimensional compatibility across the system. This reduces integration complexity and enables the machine builder to optimise the overall gantry robot for the specific demands of the application rather than accepting a compromise configuration.
Industry Applications in India: Packaging, Electronics, Automotive and Food Processing
Across Indian industry, the demand for reliable, high-throughput pick and place automation solutions is being driven by a combination of rising labour costs, increasing product quality standards, and the need to compete in global supply chains where cycle times and defect rates are tightly controlled. Each sector presents its own specific requirements for the motion system underpinning the pick and place robot arm.
In packaging, the primary requirements are speed and format flexibility. Cartesian robot systems in FMCG packaging lines must handle a wide variety of pack sizes and weights at rates that match upstream filling and forming machines. Rollon Linear Actuators with belt drives and sealed profiles are well suited to these environments, offering the combination of high cycle speed and contamination resistance that food and consumer goods packaging demands.
In electronics manufacturing the precision requirements of the pick and place automation project are particularly demanding. Placement repeatability in the range of ±0.05 mm is commonplace, and the thermal environment of electronics assembly lines places additional demands on dimensional stability. Rollon’s precision electric linear actuator configurations, with preloaded rolling elements and thermally stable aluminium profiles, address these requirements directly.
In automotive component handling and assembly, the gantry robot must manage heavier payloads often across larger working envelopes. Here, the high moment load ratings and long-stroke capability of Rollon’s Linear Axes range deliver the structural performance needed to maintain accuracy under the dynamic loads generated at the required production cadence. In food processing, the hygienic design requirements of the production environment add a further dimension: stainless steel component options and anodised surface treatments ensure that the linear motion actuator components meet food-grade standards without compromising motion performance.
FAQs
What is a pick and place robot and how does it work?
A pick and place robot is an automated system that locates a workpiece at a source position, collects it using an end effector, transports it along a programmed motion path, and releases it at a defined target position. The cycle repeats continuously at speeds determined by the axis velocities and acceleration profiles of the motion system. The accuracy of each placement is governed by the mechanical quality of the Linear Actuators or joint components that drive the robot’s axes, making component selection as important as controller specification. In Cartesian configurations, orthogonal Linear Axes provide the deterministic, highly repeatable motion that precision assembly and packaging applications require.
What are the main types of pick and place robots used in Indian industry?
The four principal types are Cartesian gantry robots, SCARA robots, delta robots, and articulated six-axis robots. Cartesian robots use orthogonal linear axes to deliver high positional accuracy across a rectangular envelope, making them well suited to heavy-payload and long-stroke pick and place automation applications in automotive and packaging. SCARA robots offer high horizontal speed for assembly tasks. Delta robots achieve the fastest cycle rates for lightweight products. Articulated robots provide the greatest flexibility of orientation but at higher mechanical complexity and maintenance cost. The choice of architecture for a given pick and place robot project depends on the payload, speed, repeatability, and working envelope requirements of the specific application.
How do linear actuators improve pick and place robot speed and accuracy?
High-quality Linear Actuators improve pick and place robot performance by providing stiff, low-friction guidance that maintains positional accuracy under the dynamic loads generated at high cycle rates. Preloaded rolling elements eliminate backlash, ensuring that the axis reaches each target position without overshoot or settling delay. Sealed electric linear actuator designs protect drive components from contamination, reducing maintenance frequency and supporting the continuous operation demands of production environments. For robot pick and place applications with sub-millimetre repeatability requirements, the combination of precision-ground profiles and optimised preload in Rollon’s Linear Axes delivers consistent performance across the full service life of the system.
What is the cost advantage of a Cartesian pick and place system versus a 6-axis robot?
A Cartesian pick and place robot built around modular Linear Actuators and Linear Axes typically offers a lower total system cost than a six-axis articulated robot of comparable reach and payload capacity. The mechanical architecture is simpler, component sourcing is straightforward, and in-house engineering teams can integrate and programme the system without specialist robotics expertise. Programming a Cartesian gantry robot arm for straight-line motion tasks is considerably more straightforward than configuring the inverse kinematics of a six-axis system. For high-volume, repetitive robot pick and place tasks within a fixed working envelope, the Cartesian configuration therefore delivers a more favourable return on investment alongside lower ongoing maintenance costs.