Linear guides
Linear guides Linear actuators
Linear actuators XP Xtrem Position
XP Xtrem Position Rod ends
Rod ends Telescopic rails
Telescopic rails Multi-axis
Multi-axis XL Xtrem Load
XL Xtrem Load Spherical plain bearings
Spherical plain bearings Curved guides
Curved guides Needle roller bearings
Needle roller bearings Circular systems
Circular systems Rollon RB
Rollon RB Locknuts and rings
Locknuts and rings Aerospace
Aerospace Contract & Building
Contract & Building Electronics
Electronics Food & Beverage
Food & Beverage Industrial machinery
Industrial machinery Healthcare
Healthcare Machine tool
Machine tool Material handling
Material handling Packaging
Packaging Railway
Railway Robotics & Automation
Robotics & Automation Special Vehicles
Special Vehicles








































The question that has been asked for years when we talk about automation with cobots is whether or not it can truly be considered “collaborative”. It is a question often asked by those who study, for example, the human-machine relationship, or work in the field of standards and certification.
The human-machine relationship
Studies in collaboration often dwell on the relationship between man and machine and the associated factors of safety and risk. One possibility is when a machine moves with excessive speed next to an operator, or if the operator is inadvertently bumped. Another case in point, if a machine has a gripper or tool mounted, even while moving at speeds appropriate to the operations it performs and the load it handles, an accidental bump can turn into a serious accident.
The standards and certifications
Another way to study collaboration and validate scenarios is the one adopted by experts in standards and certification. Professionals working in this field try to arrive at conclusions to identify pathways and scenarios that define when the production situation can be called collaborative.
These studies do not provide an effective answer to the collaborative question.
What if, from the industrial designer’s perspective at least, we are asking the wrong question?
In fact, the designer’s need is to make the best use of existing technology to meet the requirements of the application he or she is called upon to create. So the “right” question could and should rather be: can a cobot be best exploited in a variety of ways or only as a “collaborative tool”?
By making the distinction with respect to “when” collaboration is in fact needed in automation and during the various stages of production, the industrial designer can form an idea of the way forward (and so get to a useful answer to this conundrum).
In some situations, cobots can and should be collaborative. Imagine a stage of assembly in which robot and human operate are in the same work area, or a stage in which manual guidance is needed to perform certain operations.
But when is it no longer necessary? When does the robot have to perform tasks – servicing, sealing or packaging, among others – where the operator’s role is marginal or, rather, does not involve action but instead control and management?
Then it is no longer strictly necessary for the technology to be collaborative. It would then be sufficient to “physically move” the robot from one point to another on the line and allow it to perform the different tasks required to optimize automation and act with the “degrees of collaboration” actually required by the application at each specific stage.
It can be done. And this is where Rollon’s Cobot Transfer Unit (CTU) comes in.

All the advantages of the linear transfer of cobots
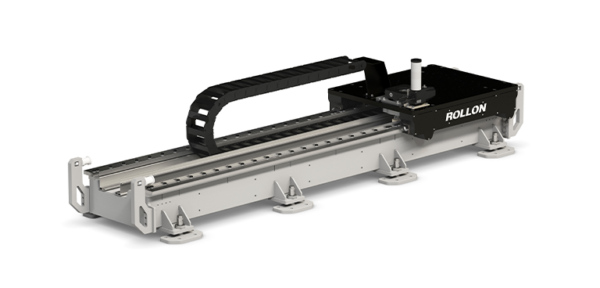
Rollon’s Cobot Transfer Unit is a complete, ready-to-install solution developed to increase the reach of cobots – starting with those of Universal Robots – in automated processes across multiple industries. A seventh “special” axis designed for the movement of collaborative anthropomorphic robots.
In detail, the CTU allows:
- INCREASED RANGE OF ACTION: with a maximum stroke even beyond the standard 5,500 mm in the catalog, the cobot’s range of action is extended quite significantly.
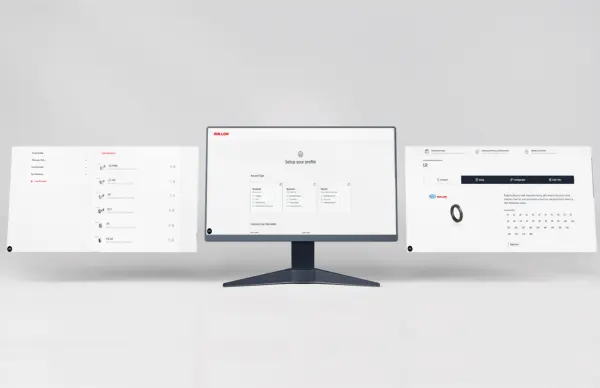
- PLUG AND PLAY FEATURE the CTU has an intuitive interface for quick programming with Rollon software and a specific debugging function for resolving any errors during the programming process. The Rollon software can manage up to six additional axes, increasing the field of application to many different work areas.
- QUICK INSTALLATION: the CTU has a connection plate specifically for cobots, which enables rapid installation of the robotic arm on the axis.
HORIZONTAL, VERTICAL AND FLOOR ASSEMBLY: a perfect opportunity for handling materials, assembly, distribution, quality inspection and finishing
Compact electrical panel, motor, drive, reduction gear and cables are included in supply. The CTU also has multiple safety features such as simultaneous, manual (by operating the stop on the teach pendant) and automatic emergency stop, which is activated by the cobot’s safety systems that also lock the axis. The axis can be fitted with external safety sensors such as laser, optical and radar scanners.
Finally, the CTU can integrate pneumatically actuated brakes to lock the carriage onto the rail while the speed and acceleration parameters (V=1.5 m/s A=3m/s2) are optimized for operation with UR cobots, to facilitate collaborative use.
Real (and possible) collaboration occurs when it is actually required.
The CTU is therefore both a top-of-the-line solution among linear motion products and an industrial automation tool that combines the collaboration of robots with motion, even over long strokes.
The CTU represents the maximum expression of both the (collaborative) robot and the need for linear transfer to use it as a true industrial anthropomorphic robot when this aspect is needed.
So, is it necessary to be ” collaborative”? Well then the cobot can fulfil this function. Are the robot’s maximum speed and top performance capabilities needed? The cobot can then move to a safe point to perform this task.
Contact our expert to find out more.
 designed for extended cobot reach and seamless automation integration.")