Guide lineari
Guide lineari Attuatori lineari
Attuatori lineari XP Xtrem Position
XP Xtrem Position Teste a snodo
Teste a snodo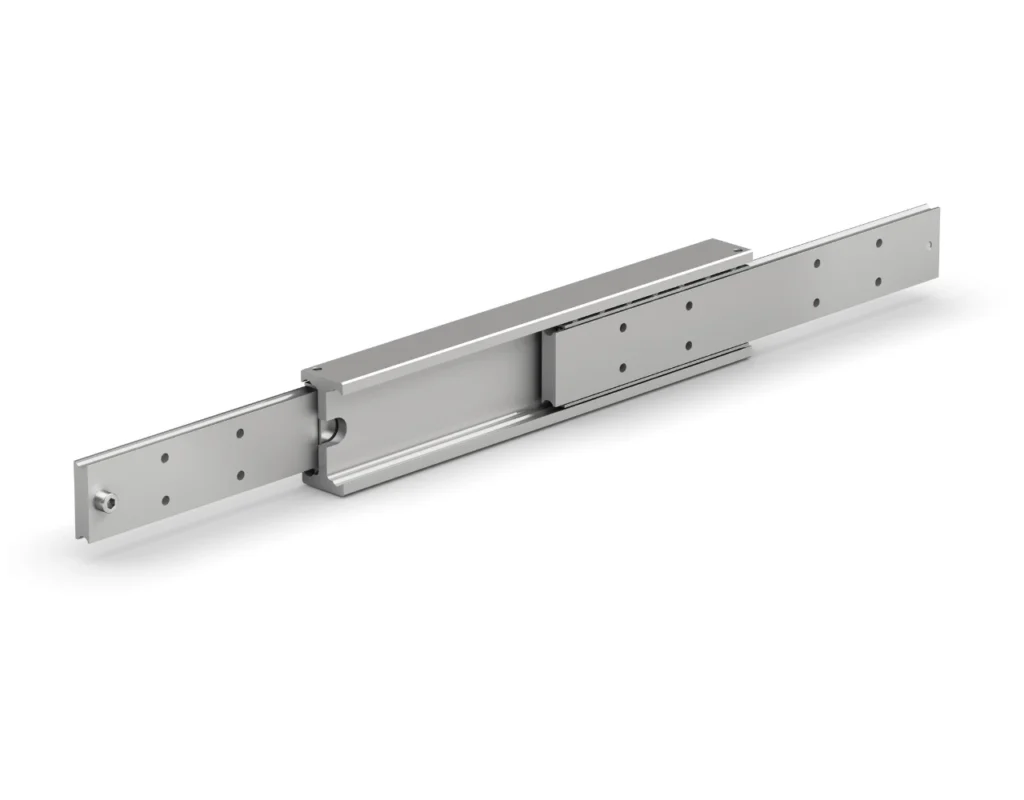 Guide telescopiche
Guide telescopiche Sistemi multi-asse
Sistemi multi-asse XL Xtrem Load
XL Xtrem Load Snodi sferici
Snodi sferici Guide curve
Guide curve Cuscinetti a rullini
Cuscinetti a rullini Sistemi circolari
Sistemi circolari Rollon RB
Rollon RB Ghiere di bloccaggio
Ghiere di bloccaggio Aerospaziale
Aerospaziale Elettronica
Elettronica Ferroviario
Ferroviario Food & Beverage
Food & Beverage Healthcare
Healthcare Interni ed architettura
Interni ed architettura Macchine industriali
Macchine industriali Macchine utensili
Macchine utensili Material handling
Material handling Packaging
Packaging Robotica ed Automazione
Robotica ed Automazione Veicoli speciali
Veicoli speciali









































Le forze inerziali, le sollecitazioni meccaniche, la flessione e i carichi a sbalzo incidono in modo significativo sulle prestazioni, sulla precisione e sulla durata nelle applicazioni di robotica e dell’automazione. Questo white paper illustra i criteri fondamentali per la scelta di soluzioni di movimento lineare in grado di affrontare tali sfide, concentrandosi su come gestire efficacemente l’interazione tra massa, accelerazione e dinamica complessiva del sistema.
Quando si selezionano componenti per il movimento lineare destinati ad applicazioni di robotica e automazione, i carichi e le velocità degli assi rappresentano criteri fondamentali. Ciò è particolarmente vero quando gli assi devono sostenere carichi pesanti o raggiungere velocità elevate, o entrambe le condizioni. Dopotutto, forza = massa × accelerazione, e gli assiemi macchina che movimentano carichi pesanti devono generare forze elevate per vincere l’elevata inerzia, soprattutto in presenza delle rapide accelerazioni e decelerazioni tipiche delle operazioni ad alta velocità.
Supportare carichi elevati
Gli impianti robotici e di automazione devono generare una forza sufficiente a movimentare i carichi applicati. Quando i carichi sono particolarmente pesanti, occorre considerare ulteriori fattori per garantire sicurezza, velocità e precisione del progetto.
Sollecitazioni meccaniche elevate
Se gli assiemi macchina non sono progettati per carichi elevati, gli effetti dell’inerzia possono generare sollecitazioni meccaniche nei componenti e ridurne la vita utile. I carichi elevati aumentano le sollecitazioni su guide lineari, cuscinetti, denti delle cremagliere nei sistemi pignone-cremagliera e sui giunti.
Flessione più pronunciata
Se la rigidezza dell’attuatore non è adeguatamente considerata, i carichi elevati possono causare la flessione degli assi. Anche deformazioni minime sotto carichi dinamici possono generare errori di posizionamento dell’ordine dei millimetri ai dispositivi di estremità delle macchine, specialmente quando gli assi sono nelle posizioni più estese.

I sistemi multiasse Rollon® YZ PAR/PAS includono strutture autoportanti in alluminio estruso ad elevata rigidità torsionale e trasmissioni a pignone e cremagliera per applicazioni nei settori pick-and-place, machine tending e logistica. Alcune varianti possono trasportare carichi fino a 2.000 kg su corse fino a 12 m, con velocità fino a 4 m/s.
Le guide lineari, gli attuatori, i sistemi multiasse e gli RTU di Rollon sono disponibili con strutture in alluminio o acciaio (con sottocomponenti realizzati in vari materiali ingegnerizzati) per resistere a torsioni, flessioni, usura e altre sollecitazioni.
Effetti dei carichi a sbalzo
Se il carico trasportato da un attuatore, un sistema multiasse o un RTU è a sbalzo – come nel caso di un braccio robotico montato su RTU che si estende verso l’esterno – è necessaria una forza maggiore rispetto a un carico perfettamente rigido e centrato sul carrello. Soprattutto con carichi elevati, la distanza tra il centro di gravità e il centro dell’asse introduce momenti di beccheggio significativi, che obbligano strutture di supporto, guide e sistemi di azionamento a resistere alla rotazione. Ciò comporta una ridistribuzione dei carichi sui cuscinetti, con conseguente aumento dell’attrito e possibile flessione della struttura. Quest’ultima, abbinata ad una lieve rotazione del sistema, può compromettere ripetibilità e linearità lungo la corsa. In sintesi, tali momenti introducono una penalizzazione della dinamica che può essere significativa in presenza di masse molto elevate.
Componenti lineari e attuatori adeguati
Le guide lineari destinate ad assi dinamici presentano spesso varianti a rulli, in grado di offrire elevata capacità di carico e rigidezza, insieme ad alte velocità e accelerazioni. Le guide prismatiche Rollon e altre guide a rulli – tra cui Heavy Line e V-Line – resistono anche in ambienti contaminati o aggressivi.
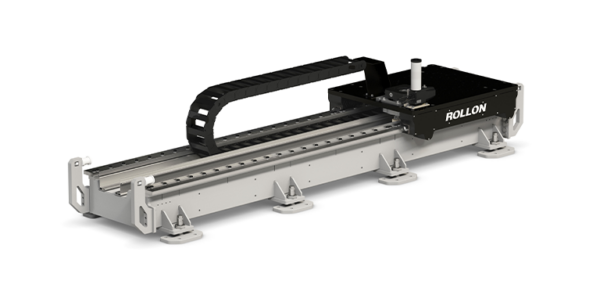
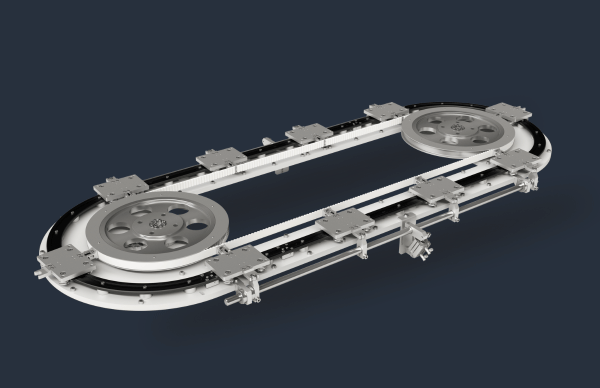
Consideriamo un esempio di prodotti azionati da cinghia sincrona progettata per gestire carichi elevati. Gli attuatori lineari Rollon® R-SMART e R-SMART-R offrono un’elevata capacità di carico grazie a strutture autoportanti in alluminio estruso. Con larghezze comprese tra 120 e 280 mm, possono sostenere e trasportare carichi molto elevati in applicazioni automatizzate con cicli di lavoro gravosi e montaggio a sbalzo o su portale. L’uso di più carrelli può aumentare la capacità di carico. Il carrello è supportato da doppie guide lineari: coppie di guide profilate con sfere a ricircolo (R-SMART) oppure guide prismatiche temprate con rulli (R-SMART-R). R-SMART può raggiungere 4 m/s e 50 m/s², mentre R-SMART-R arriva fino a 8 m/s e 20 m/s²; serbatoi o pattini autolubrificanti con feltri garantiscono la lubrificazione.

Gli attuatori Rollon® R-SMART possono sostenere e trasportare carichi molto elevati grazie alla robusta struttura in alluminio e alla trasmissione a cinghia adeguatamente dimensionata. Le pulegge sono di grandi dimensioni e dotate di cuscinetti rinforzati, riducendo così le sollecitazioni sui cuscinetti del motore e del riduttore (poiché un diametro maggiore consente regimi del motore più contenuti). Qui è mostrato il modello R-SMART 160; le versioni 230 e 280 ne estendono ulteriormente le prestazioni.
Continua a leggere per scoprire in che modo l’inerzia influisce sul dimensionamento degli attuatori e sulle prestazioni del sistema, il rapporto tra massa del carico utile, accelerazione e precisione di posizionamento, nonché le linee guida pratiche per la scelta degli attuatori nelle applicazioni di robotica e automazione.