Guide lineari
Guide lineari Attuatori lineari
Attuatori lineari XP Xtrem Position
XP Xtrem Position Teste a snodo
Teste a snodo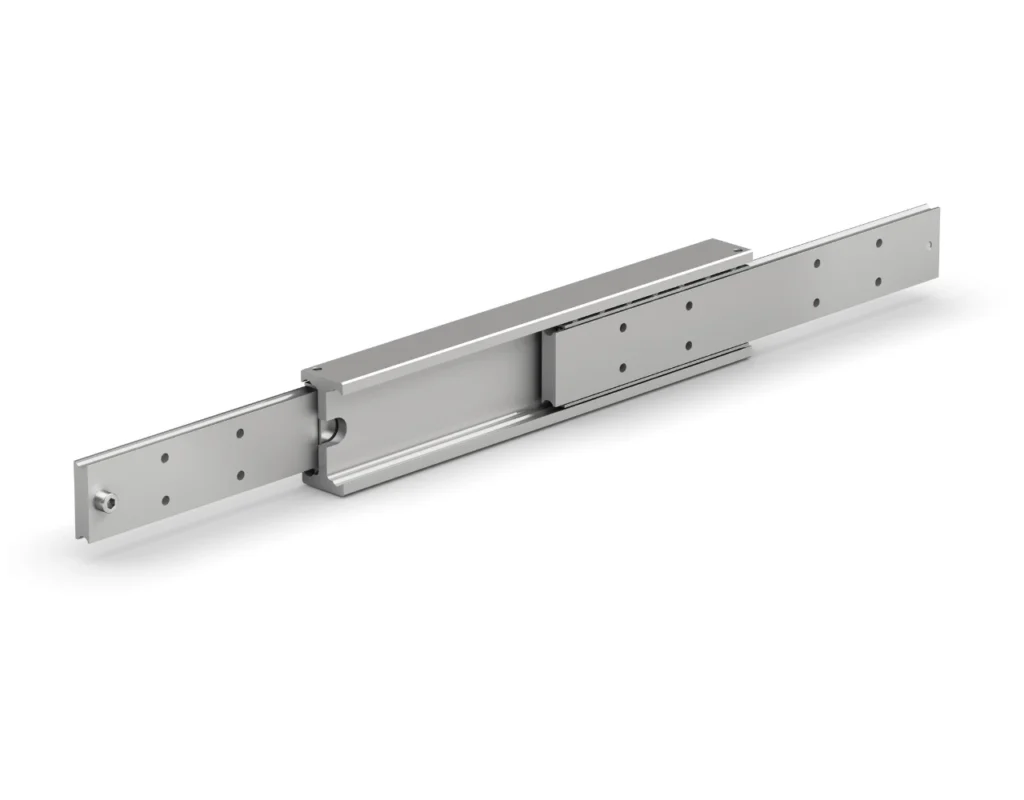 Guide telescopiche
Guide telescopiche Sistemi multi-asse
Sistemi multi-asse XL Xtrem Load
XL Xtrem Load Snodi sferici
Snodi sferici Guide curve
Guide curve Cuscinetti a rullini
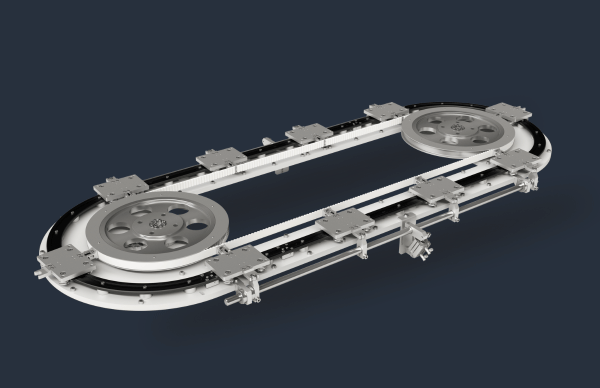
Cuscinetti a rullini Sistemi circolari
Sistemi circolari Rollon RB
Rollon RB Ghiere di bloccaggio
Ghiere di bloccaggio Aerospaziale
Aerospaziale Elettronica
Elettronica Ferroviario
Ferroviario Food & Beverage
Food & Beverage Healthcare
Healthcare Interni ed architettura
Interni ed architettura Macchine industriali
Macchine industriali Macchine utensili
Macchine utensili Material handling
Material handling Packaging
Packaging Robotica ed Automazione
Robotica ed Automazione Veicoli speciali
Veicoli speciali









































Il precarico può essere un fattore determinante in molte applicazioni di movimento lineare. Questo articolo spiega perché si precaricano guide lineari e attuatori e fornisce indicazioni su quando è vantaggioso applicare il precarico, quando è opportuno ridurlo o evitarlo, e su come determinare il livello di precarico più adeguato per un determinato progetto.
È possibile applicare il precarico a un’ampia gamma di componenti lineari, tra cui guide a cuscinetti, guide profilate, e azionamenti lineari quali viti a ricircolo di sfere e spline. Nelle guide lineari, il precarico si ottiene riducendo o eliminando il gioco tra il cursore (detto anche carrello), i suoi elementi volventi e la guida lineare.
Il risultato è una soluzione più rigida, priva di gioco e con una flessione ridotta quando sostiene un carico. Ciò è fondamentale nelle applicazioni che richiedono movimenti precisi basati su un posizionamento accurato e ripetibile.
Le guide lineari Rollon MGB e le guide profilate costituiscono un ottimo esempio di precarico nei sistemi che richiedono un posizionamento altamente preciso di carichi leggeri e pesanti. In questo caso, l’elemento scorrevole è un cursore a ricircolo di sfere.
Queste sfere possono essere leggermente sovradimensionate rispetto alla distanza tra la superficie della pista di scorrimento e la pista delle sfere all’interno del cursore. Le sfere leggermente sovradimensionate possono conferire un precarico pari a circa il 2% della capacità di carico della guida lineare, mentre quelle maggiormente sovradimensionate possono generare un precarico più elevato, pari a circa il 4%.
La serie Rollon MGB è disponibile in tre classi di precarico:
- K0: precarico quasi nullo per un movimento fluido.
- K1: precarico leggero per una maggiore rigidità, una flessione ridotta e vibrazioni minimizzate, per bilanciare rigidità e fluidità di movimento.
- K2: precarico elevato per la massima rigidità in presenza di carichi dinamici o vibrazioni, a scapito di un aumento dell’attrito e di una riduzione della durata o delle capacità di accelerazione.

Guida lineare MGB.
Come scegliere il precarico più adatto
Il precarico ottimale per una guida lineare dipende principalmente da:
- Il numero di guide utilizzate su un asse.
- Il parallelismo ottenibile tra guide parallele (ove applicabile).
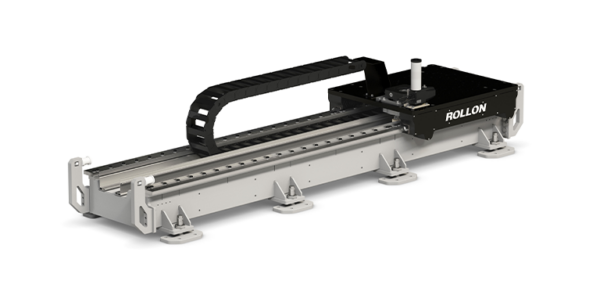
Ad esempio, gli attuatori a doppia guida, come Rollon Robot Plus o R-Smart, utilizzano coppie di carrelli su guide parallele per garantire un supporto a quattro punti e minimizzare i cedimenti lungo gli assi principali. In tali sistemi, l’aumento del precarico comporta anche un aumento dei requisiti di allineamento. Un allineamento insufficiente può altrimenti generare forze e momenti aggiuntivi che riducono la durata.

Attuatore lineare ROBOT.
Anche la rigidità e la dinamica di funzionamento sono fattori fondamentali. Le viti a ricircolo di sfere e i motori lineari vengono spesso abbinati a guide con precarico moderato o elevato, poiché le applicazioni che giustificano l’uso di questi azionamenti richiedono in genere anche un’alta rigidità. Un’unità con vite a ricircolo di sfere di precisione come l’attuatore lineare Rollon TT sfrutta un precarico più elevato per ottenere un’alta rigidità.
Un precarico più elevato può inoltre impedire lo slittamento degli elementi volventi in caso di accelerazioni elevate, come nei sistemi azionati da motori.
Tuttavia, ci sono casi in cui un precarico eccessivo comporta degli svantaggi. Nei componenti miniaturizzati o nelle applicazioni in cui il costo è un fattore determinante, il precarico può ridurre la durata prevista o richiedere motori più grandi e costosi a causa dell’aumento delle forze di attrito. Laddove il precarico causi una generazione di calore inaccettabile, esso dovrebbe essere ridotto o eliminato.
Nei rari casi in cui il precarico possa introdurre un carico statico che non viene completamente compensato dal carico utile dell’asse, i suoi effetti sulla capacità di carico e sulla durata del sistema dovrebbero essere valutati attentamente prima di prendere una decisione definitiva.
Quando il precarico è indispensabile
Un precarico leggero – in genere pari al 2% della capacità di carico di una guida – è spesso necessario per mantenere la precisione di posizionamento in applicazioni quali taglio, stampa, assemblaggio, imballaggio, imaging medico e altre attività di controllo del movimento che prevedono carichi leggeri o moderati. Un precarico leggero può inoltre essere sufficiente in applicazioni in cui i carichi si muovono costantemente in un’unica direzione.
Un precarico da moderato a elevato – 5% – è solitamente necessario per evitare la flessione delle guide nei sistemi di stoccaggio, lavorazione meccanica e altri sistemi di movimento che trasportano carichi di grandi dimensioni. Un precarico più elevato è fondamentale anche per ridurre al minimo la flessione negli assi lineari a sbalzo, come quelli presenti negli end effector dei robot cartesiani.
Scegliere il sistema lineare più adatto alla propria applicazione
Quando il precarico è un fattore determinante, scegliere fin dall’inizio il livello corretto è fondamentale per soddisfare i requisiti applicativi in termini di prestazione, durata e costi. Rivolgersi a un tecnico Rollon può aiutare a garantire che il sistema lineare sia correttamente specificato in base alle esigenze della propria applicazione.
Contatta un ingegnere Rollon per individuare la soluzione lineare più adatta al tuo sistema.