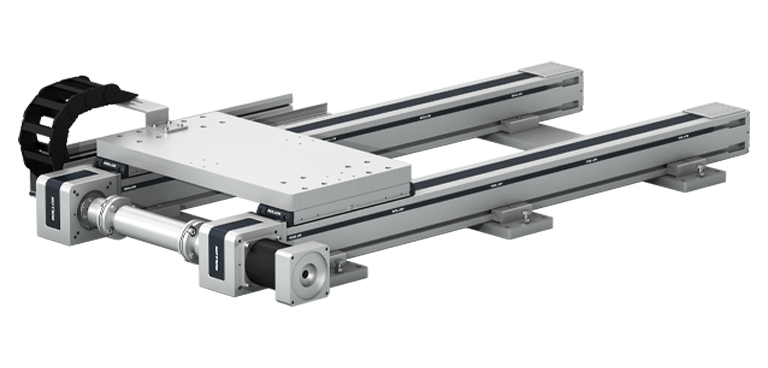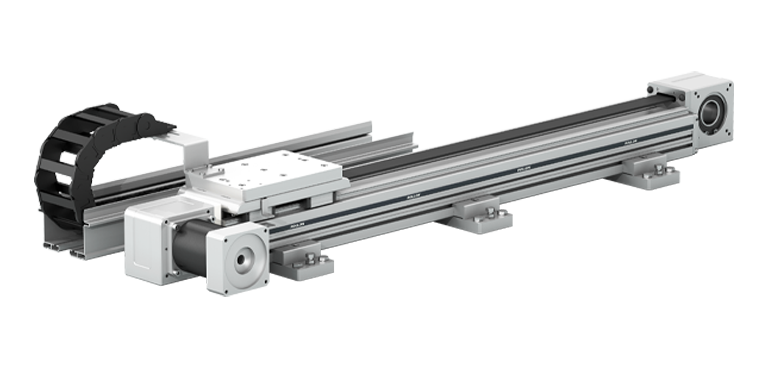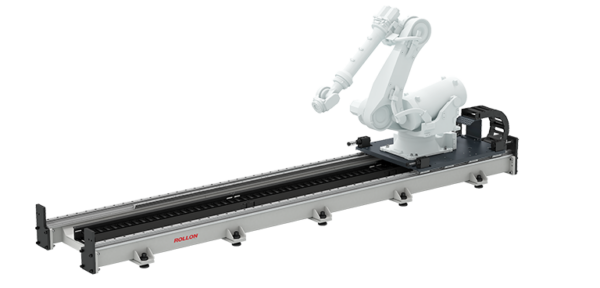

























Many automated tasks across the automotive, electronics and consumer goods industries are accomplished by sophisticated, six-axis articulated arm robots designed to perform highly precise operations. But if you need to move these robots into position, it makes sense to add a seventh axis––a linear shuttle system that moves the robot to different stations to extend its operating area
Adding a seventh axis expands the robot’s work envelope, increases machine efficiency and reduces capital costs. But to take full advantage of this approach, it’s important to keep the following considerations in mind:
Load capacity. Because static loads occur when the robot is secured in place, load weight, deflection and center of gravity are the most important factors to consider. The robot’s base must be strong enough to support the load and sturdy enough so that it doesn’t tip over when the arm moves its payload.
Dynamic load capacity. Dynamic loads come into play when the robot moves along its linear path. A correctly sized safety margin is therefore critical to factor into your load calculation. Hard stops must also be sized, preventing the robot from leaving its rail if it were to run into the stop at full speed and with a full load.
Speed and acceleration. To match the actuator to the robot, it’s important to know required travel speeds and acceleration/deceleration rates. Some linear actuators are designed to handle heavy loads at speeds up to 5 m/s while others are meant for lighter, slower operations.
Precision and accuracy. An application’s accuracy and repeatability requirements should drive your rail hardware selection. To prevent deflection, additional support beams may be necessary if multiple robots will be sharing a rail. Also, you might need to integrate locating pins or other alignment features into your rail’s design to give the robot a reference point for calibration.
Duty cycle and lifetime. To start, consider your application’s duty cycle and cycle time. Will the robot be used in round-the-clock operation or only a few hours each day? Also think about your system’s lifecycle requirements and whether the robot will need to run for two, five or 10 years, for example.
To learn more about adding a seventh axis to your six-axis robot system, download our latest white paper.