Linear Guides
Linear Guides Linear Actuators
Linear Actuators XP Xtrem Position
XP Xtrem Position Rod Ends
Rod Ends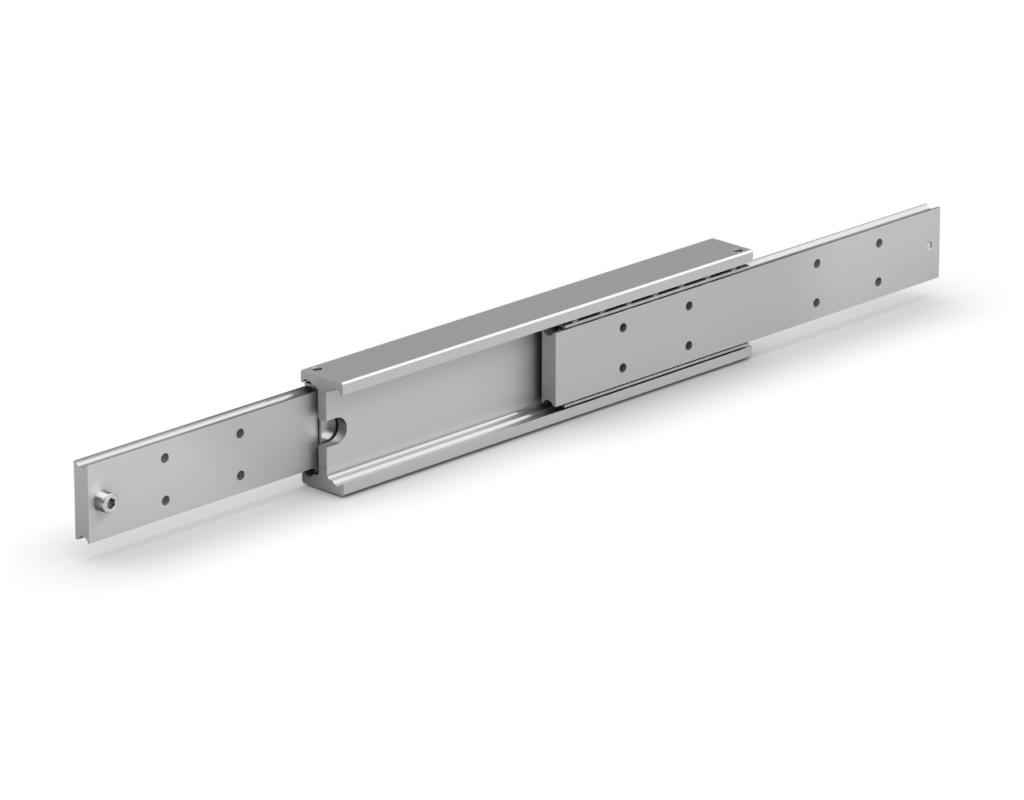 Telescopic Rails
Telescopic Rails Multi-Axis Systems
Multi-Axis Systems XL Xtrem Load
XL Xtrem Load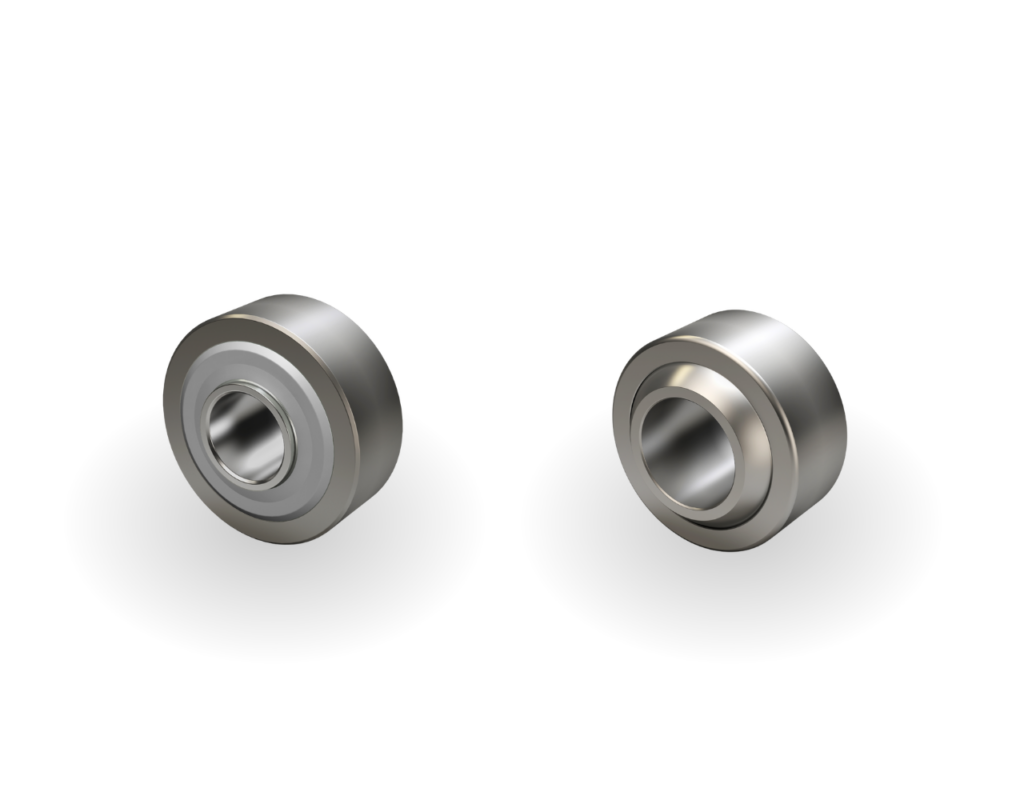 Spherical Plain Bearings
Spherical Plain Bearings Curved Guides and Rails
Curved Guides and Rails Needle Roller Bearings
Needle Roller Bearings Circular Systems
Circular Systems Rollon RB
Rollon RB Locknuts and Rings
Locknuts and Rings Aerospace
Aerospace Building and Furniture
Building and Furniture Electronics
Electronics Food & Beverage
Food & Beverage Healthcare
Healthcare Industrial Machines
Industrial Machines Machine Tool
Machine Tool Material Handling
Material Handling Packaging
Packaging Railway
Railway Special Vehicles
Special Vehicles Robotics & Automation
Robotics & Automation









































The task of selecting, sizing and applying linear actuators involves many variables, from stroke length and duty cycle to precision and accuracy requirements. Ultimately, matching the right actuator to the intended application requires a close look at all of the specifications involved and then working within the project’s performance, time and budget constraints. Certain manufacturing operations are more rigorous than others, with end-of-line packaging applications among the most demanding when it comes to linear actuation.
Activities such as palletizing, case packing, cartoning and lane diverting require strong and reliable motion components.
What does a design engineer or system integrator need to know when selecting actuators for these heavy-duty packaging operations? Here we take a detailed look at some of the most important aspects to consider.
Precision and accuracy
What level of precision, accuracy and repeatability does the application demand? In the majority of end-of-line packaging applications involving actuators, positioning repeatability to 50 μm is acceptable.
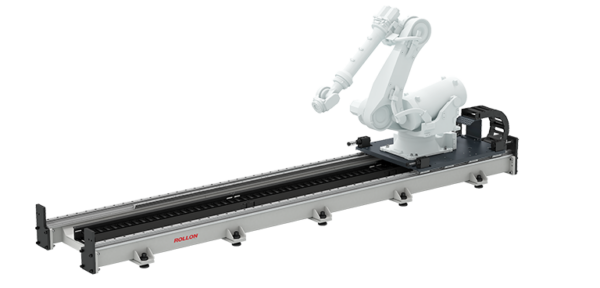
Consider a SCARA robot with a vacuum end effector or other gripper sitting atop a linear actuator. The actuator is used to linearly move the robot into various positions so that the end effector can pick up cases and move them onto pallets.
Motion must be repeatable, reliable and fairly precise for the robot to do its job, though pinpoint accuracy is rarely needed in this scenario. However, for tasks requiring more precise positioning, ask your actuator supplier about the option of adding a linear encoder.
Sturdy actuators suit end-ofline packaging tasks
Linear actuators designed for heavy-duty packaging applications are used for many jobs:
- Case packing
- Cartoning
- Robotic palletizing
- Lane diverting
- Shrink wrapping
- Multiple-axis gantry systems
- Moving SCARA robots into position
- Traversing of high loads on parallel axes
- Push/pull of heavy weights

Load Capacity
Think about the loads, moments and forces that the actuator will be required to handle. For heavy-duty packaging applications, this will likely involve some fairly demanding dynamic load capacities. How much load can the actuator handle during high speeds and acceleration?
Take a close look at the actuator’s specifications for thrust capacity, dynamic load capacity and bending moments. Load capacity is directly related to the internal construction of an actuator.
While many linear actuators look similar from the outside, some are built to handle high loads at high speeds, while others may only support light loads at high speeds.
Note: Pay special attention to units when comparing actuators. Some manufacturers use SI/metric figures, while others use U.S. customary or imperial units. Be sure you are making an apples-to-apples comparison when looking at specifications data.
Travel lenght and space
Determine the required stroke length as well as the volumetric envelope the system must fit within. For example, will the actuator be used to move a robot into position? If so, how far will the robot need to travel on its linear path? Or will several actuators be used to create a Cartesian gantry system to move cases around?
In certain end-of-line packaging scenarios, it makes sense to build a three-axis gantry system out of heavy-duty rigid actuators to handle heavy loads rather than using a SCARA robot with a more limited payload capacity. In many cases, a gantry system may require the same or less volumetric space than a comparable SCARA robot system.
The actuation of an actuator directly affects the performance of your system. Download our free White Paper to consciously choose the right one for your needs
Duty cycle
Consider the application’s motion profile, duty cycle, cycle time and dwell time in addition to lifetime requirements.
Many packaging applications such as palletizing and cartoning require nearly constant motion as actuators move back and forth between different positions.
Be sure to ask your actuator supplier about maintenance and lubrication schedules as well. Some actuators only need relubrication after a service life of 20,000 km, while others demand more frequent attention.
Operating envitonment
What are the working conditions the actuator and larger system will be subjected to? Will special seals or bellows be required to protect the actuator’s moving parts from dust, moisture or other contaminants? Ask your supplier if these are available.
Spatial orientation
How will the actuator be oriented in the available space? How will loads and forces be oriented? Consider mounting options as well. Many packaging operations call for horizontal mounting, though vertical mounting is often required in multiaxis systems and for operations such as shrink wrapping.
The more information provided to your actuator supplier in the early stages of system design, the more successful your application will be. In addition, consider the linkages between actuators in multi-axis setups.
Some suppliers provide fittings such as brackets and cross plates designed to rigidly connect actuators to each other, while others leave these connection tasks to the end user. Improperly connected systems can lead to problems with misalignment, vibration, reduced accuracy and, ultimately failure.
Speed and acceleration
To select the proper actuator for the packaging task, one must first know the travel speed in addition to the required acceleration and deceleration rates. Does the actuator need to quickly match the speed of a moving conveyor belt to be able to grab cartons at a certain point and then move those cartons to a pallet?
Perhaps a robot needs to be moved into position for a few seconds while it completes a pick-and-place motion and then must be retracted to its original position.
These are the details your actuator supplier will need to know. Some heavy-duty actuators are able to support high loads at speeds to 5 m/s while others are more limited in their speeds and load capacities.
Actuator construction
As mentioned earlier, many actuators share a similar appearance at first glance. Most are made of anodized aluminum extrusions for high strength and low weight, but this is where the similarities often end.
When specifying an actuator for the heavy usage and demanding loads involved in end-of-line packaging operations, it pays to look closer.
One area of interest is the guide system. Look for pre-loaded linear guides, which help improve the accuracy, repeatability and stiffness of the entire moving system.
Rubber coated or plastic guide wheels may work fine at the outset, but are not nearly as long lasting or rigid as preloaded guides. Consider the bearings as well.
Pre-loaded linear bearings made of machine tool grade steel go a long way toward increasing system stiffness and accuracy. In the case of belt-driven actuators, another area to look at involves shaft and pulley construction.
Look for steel pulleys for strength and longevity. Also consider how the shaft and pulley assembly is made: Assemblies that are machined from one piece of steel mean that the pulley cannot slip on the shaft, in contrast to multiple component arrangements where the pulley is press-fit to the shaft.
In addition, look for pulleys that use sturdy bolt-on flanges to guide the belt as opposed to lightweight flanges that are pressed on or formed in with the pulley.
Finally, look for preloaded radial ball bearings on the pulley drive rather than plastic or bronze bushings. All of these details add up to a heavy-duty actuator that can handle the punishing loads of end-of-line packaging applications.
Gearbox and motor matching
When it comes to specifying highspeed beltdriven actuators for demanding packaging operations, more than 95% will require a gearbox or speed reducer for inertia matching and as a torque multiplier.
Some actuator suppliers include integrated planetary gearboxes as part of a complete actuator assembly to make specification simpler. Another area to inquire about involves motor sizing data.
Ask your actuator supplier if they can provide detailed application engineering data to your motor manufacturer so that the entire system is matched correctly to the intended application. Some suppliers offer this pre-engineering documentation as part of a comprehensive quote.
Are you interested in actuators and would like to know how to adapt them to your applications? Contact us