Linear guides
Linear guides Linear actuators
Linear actuators XP Xtrem Position
XP Xtrem Position Rod ends
Rod ends Telescopic rails
Telescopic rails Multi-axis
Multi-axis XL Xtrem Load
XL Xtrem Load Spherical plain bearings
Spherical plain bearings Curved guides
Curved guides Needle roller bearings
Needle roller bearings Circular systems
Circular systems Rollon RB
Rollon RB Locknuts and rings
Locknuts and rings Aerospace
Aerospace Contract & Building
Contract & Building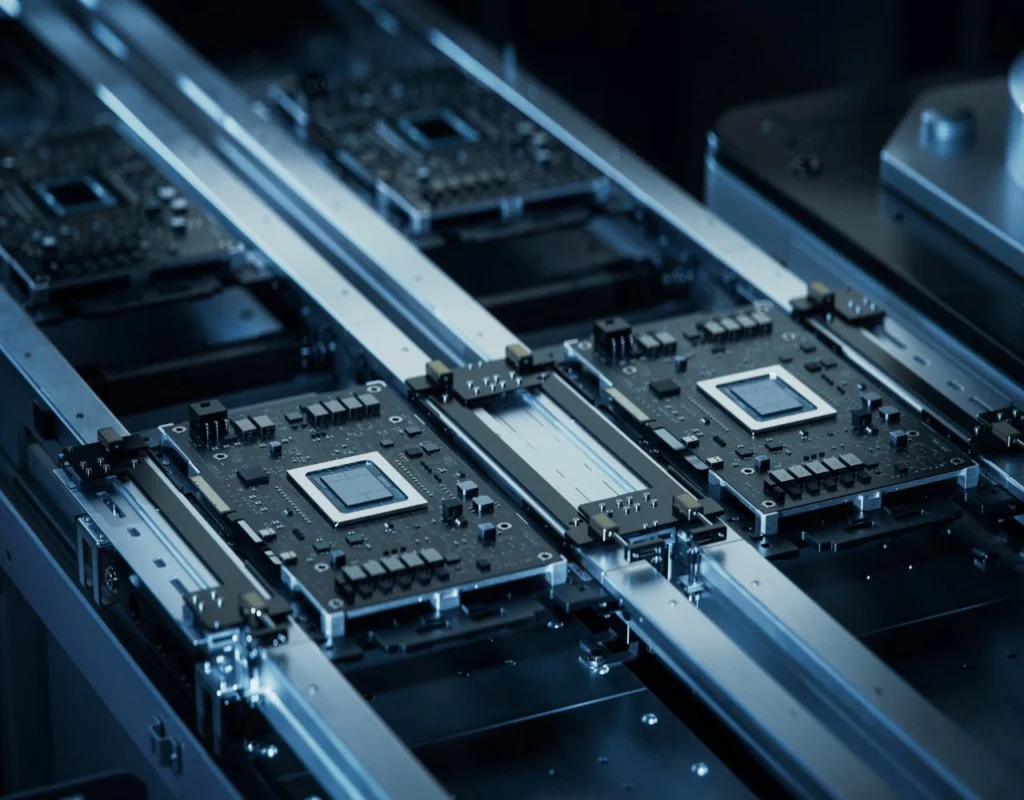 Electronics
Electronics Food & Beverage
Food & Beverage Industrial machinery
Industrial machinery Healthcare
Healthcare Machine tool
Machine tool Material handling
Material handling Packaging
Packaging Railway
Railway Robotics & Automation
Robotics & Automation Special Vehicles
Special Vehicles








































The pick and place robot is among the most productive and widely deployed systems in modern industrial automation, handling the repetitive task of moving components or products from a defined source to a defined destination at speeds and cycle rates that manual operations cannot approach. Whether the application is pharmaceutical blister packing, electronics assembly, food portioning or automotive component handling, the performance of the underlying motion system determines how reliably and accurately the pick and place robot performs across millions of operating cycles.
What is a pick and place robot? Definition and working principle
A pick and place robot is an automated system designed to locate a workpiece or product at a source position, collect it using an end effector and transfer it to a defined target position before releasing it and returning to repeat the cycle. The working principle is straightforward in concept but demanding in execution: achieving consistent placement accuracy at high cycle rates, across extended periods of continuous operation, requires precise motion control and mechanically robust guidance components that maintain their performance as wear accumulates over time.
The repeatability of the pick and place robot cycle is determined principally by the mechanical quality of the axes and drives that move the end effector. Any backlash, compliance, or thermal drift in the Linear Actuators or joint components translates directly into positional error at the point of pickup or deposit. For applications where components must be placed into fixtures or trays with sub-millimetre accuracy, as is routinely the case in electronics assembly and pick and place machine deployments in medical device manufacturing.
Types: cartesian, SCARA, delta and articulated
Four principal robot architectures account for the majority of pick and place automation installations in UK industry. The Cartesian, or gantry, robot moves a tool-carrying carriage along orthogonal linear axes in X, Y, and Z, achieving deterministic positional accuracy across a rectangular working envelope. Because each axis moves independently along a straight path, the kinematics are simple, programming is straightforward, and positioning errors do not compound across joints. This makes the Cartesian pick and place robot the preferred choice for heavy-payload, long-stroke, or high-precision applications where accuracy must be maintained across a large working area.
The SCARA robot combines two horizontal rotary joints with a vertical linear axis, offering fast, stiff motion in the horizontal plane with controlled vertical descent. It is the dominant architecture for high-speed pick and place machine applications in electronics assembly, where compact working envelopes and cycle times measured in fractions of a second are the defining requirements. The delta robot suspends its end effector from three parallel linkages on a fixed overhead frame, achieving extremely high cycle rates for lightweight products such as confectionery, blister packs, and small components. The articulated six-axis robot provides maximum flexibility of orientation and reach, at the cost of greater mechanical complexity and higher sensitivity to joint wear in high-cycle robotic pick and place operations.
Key engineering factors: speed, payload, repeatability and reach
Selecting the correct pick and place robot for a given application requires careful evaluation of four interdependent engineering parameters. Speed, expressed as peak axis velocity or cycles per minute, must match the throughput rate of the upstream production process. Payload capacity must account for the combined weight of the end effector and the heaviest workpiece in the product range, including the additional dynamic forces generated during acceleration and deceleration at the configured cycle rate.
Repeatability is the most critical accuracy metric for any pick and place automation engineer to verify during system specification. It is distinct from absolute positioning accuracy and is governed by the mechanical quality of the Linear Actuators and guidance components, particularly their preload, stiffness, and thermal stability. Reach defines the spatial extent of the working envelope and must comfortably encompass all source and target positions with adequate clearances for the end effector and any workpiece handling tooling.
Matching the right motion platform to your application
For a pick and place robot tasked with handling a wide variety of product formats across a large working area the Cartesian gantry configuration built around high-quality Linear Actuators and Multi-Axis Systems is typically the most technically and commercially appropriate solution. The modular nature of Cartesian gantry systems allows engineers to specify each axis independently for its particular load, speed, and stroke requirements, and to reconfigure the system when product formats change without replacing the entire robot platform.
For applications where very high cycle rates are required for lightweight products in a compact working envelope a delta or SCARA architecture will usually deliver superior throughput. The key is to match the selected robot architecture to the actual demands of the application rather than to adopt a generic platform that requires compromise. In all cases, the quality of the linear actuator components used in the motion system is the single most important determinant of long-term performance.
The role of linear actuators and gantry systems in pick and place
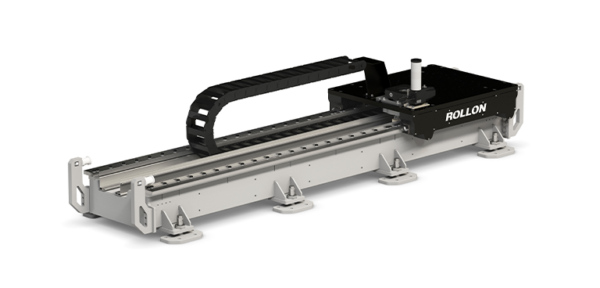
In Cartesian pick and place robot systems, the linear actuator is the fundamental building block of every axis. It converts rotary motor output into controlled linear displacement, integrating a profiled rail or structural beam, a driven carriage, and a transmission element into a single unit. The performance of this unit determines the axis repeatability, maximum speed, dynamic load capacity, and service life of the entire system. A high-quality electric linear actuator with a precision-ground recirculating ball carriage and a low-backlash drive will deliver the sub-millimetre repeatability that demanding pick and place machine applications require over extended operational life.
The choice between belt-driven and ball-screw Linear Actuators depends on the specific speed, load, and precision requirements of the application. Belt-driven actuators excel in high-speed, long-stroke axes where the compliance of the belt is acceptable within the positional tolerance requirements of the task. Ball-screw actuators provide superior precision and stiffness under axial load, making them the preferred choice for the Z axis in robotic pick and place systems where the end effector must descend to a precise depth at the pick and place positions. In both cases, the structural design of the actuator profile and the moment load rating of the rolling element guidance must be adequate for the dynamic loads generated by high-cycle operation.
Rollon multi-axis solutions for high-cycle operations
Rollon’s Multi-Axis Systems provide engineers with complete, pre-engineered gantry solutions that combine two or three linear actuators into a structurally integrated assembly optimised for pick and place automation. The modular architecture allows each axis to be independently configured for its load, speed, and stroke requirements, whilst maintaining dimensional compatibility across the system. This simplifies integration, reduces design engineering time, and enables machine builders to optimise the pick and place robot for the specific demands of the application.
Industry applications: packaging, electronics, food and beverage
In packaging, pick and place automation systems must handle a wide variety of format sizes and pack weights at throughput rates that match upstream filling and sealing machines. Rollon Linear Actuators with sealed profiles and belt-drive configurations are well suited to these environments, offering the combination of high cycle speed, contamination resistance, and straightforward format adaptation that packaging machine builders require.
In electronics manufacturing the pick and place machine must achieve placement repeatability in the range of ±0.05 mm or better across millions of cycles. Here, the thermal stability and mechanical precision of the Linear Actuators are the dominant performance drivers. Rollon’s precision-ground profiles and optimised preload configurations deliver the dimensional consistency required to maintain accuracy as the system heats up during extended production runs.
In food and beverage production, robotic pick and place systems operate in environments where hygiene requirements impose additional constraints on materials, surface treatments, and lubrication systems. Rollon’s stainless steel component options and food-grade lubrication variants for Linear Actuators and Multi-Axis Systems address these requirements directly, enabling pick and place robot integrators to specify motion components that meet food safety standards without compromising mechanical performance or service life.
FAQs
What is a pick and place robot and how does it work?
A pick and place robot is an automated system that locates a component or product at a defined source position, collects it using an end effector, transports it along a programmed motion path, and releases it at a target position before repeating the cycle. The accuracy and repeatability of the cycle are determined by the mechanical quality of the Linear Actuators or joint components that drive the robot’s axes, with any backlash or compliance in the motion system translating directly into positional error at the end effector. In Cartesian configurations, orthogonal linear actuators provide deterministic motion along each axis, making these systems straightforward to programme and highly repeatable over extended operating periods. The cycle rate achievable depends on the dynamic performance of the Multi-Axis Systems involved and the control strategy used to optimise acceleration and deceleration profiles.
What are the main types of pick and place robots?
The four principal types used in UK industry are Cartesian gantry robots, SCARA robots, delta robots, and articulated six-axis robots. Cartesian robots use orthogonal linear actuators to deliver high positional accuracy across a rectangular working envelope, making them well suited to heavy-payload pick and place automation and long-stroke applications. SCARA robots offer fast, stiff horizontal motion for high-cycle electronics assembly. Delta robots achieve the highest cycle rates for lightweight products. Articulated robots provide the greatest orientation flexibility but at the cost of higher mechanical complexity. The correct choice of architecture for a given pick and place machine depends on the payload, speed, precision, and working envelope requirements of the specific application.
How do linear actuators improve pick and place robot performance?
High-quality Linear Actuators improve pick and place robot performance by providing stiff, low-friction guidance that maintains positional accuracy under the dynamic loads generated at high cycle rates. Preloaded rolling elements eliminate backlash, ensuring the axis reaches each target position within the required tolerance without overshoot or settling delay.
What industries benefit most from pick and place automation?
Packaging, electronics, food and beverage, automotive, and pharmaceutical manufacturing are among the UK industries that see the greatest operational benefits from pick and place automation. Packaging operations benefit from the speed and format flexibility of pick and place robot systems built around modular Linear Actuators. Electronics manufacturers rely on pick and place machine precision for component placement accuracy.